Comprendre OpenMind en un article : créer un système d'exploitation mondial et un réseau de confiance pour l'intelligence incarnée
TechFlow SélectionTechFlow Sélection
Comprendre OpenMind en un article : créer un système d'exploitation mondial et un réseau de confiance pour l'intelligence incarnée
OpenMind construit un système d'exploitation universel pour robots, permettant aux robots non seulement de percevoir et d'agir, mais aussi de coopérer de manière décentralisée, sécurisée et à grande échelle dans n'importe quel environnement.
Pourquoi un âge ouvert de la robotique est nécessaire
Dans les 5 à 8 prochaines années, le nombre de robots sur Terre dépassera le milliard d'unités, marquant le tournant où ils passeront d'une simple « démonstration autonome » à une véritable « division du travail sociale ». Les robots ne seront plus seulement des bras mécaniques sur une chaîne de montage, mais des « collègues, enseignants et partenaires » capables de percevoir, comprendre, décider et collaborer avec les humains.
Récemment, le matériel robotique a connu une croissance fulgurante, comme des muscles se développant rapidement : mains plus habiles, démarche plus stable, capteurs plus riches. Mais le véritable goulot d'étranglement ne réside pas dans les moteurs ou les métaux, mais dans la capacité à leur donner un esprit partagé et coopératif :
-
Les logiciels des différents fabricants sont incompatibles, empêchant les robots de partager compétences et intelligence ;
-
La logique décisionnelle est enfermée dans des systèmes fermés, impossibles à vérifier ou optimiser depuis l'extérieur ;
-
Une architecture centralisée implique une innovation lente et un coût élevé en termes de confiance.
Cette fragmentation rend difficile la transformation des progrès des modèles d'IA en productivité reproductible pour l'industrie robotique : les démos unitaires foisonnent, mais il manque la migration inter-appareils, les décisions vérifiables et une collaboration standardisée, ce qui entrave toute mise à l'échelle. OpenMind vise justement à résoudre ce « dernier kilomètre ». Notre objectif n'est pas de construire un robot qui danse mieux, mais de fournir aux innombrables robots hétérogènes du monde entier une base logicielle commune et une norme de collaboration :
-
Permettre aux robots de comprendre le contexte et d'apprendre les uns des autres ;
-
Permettre aux développeurs de créer rapidement des applications sur une architecture open source et modulaire ;
-
Permettre aux humains et machines de collaborer et de régler leurs échanges en toute sécurité selon des règles décentralisées.
En un mot, OpenMind construit un système d'exploitation universel pour les robots, permettant non seulement la perception et l'action, mais aussi une coopération sécurisée et massive via une coordination décentralisée dans tout environnement.
Qui parie sur cette voie : financement de 20M et équipe mondiale
OpenMind a levé 20 millions de dollars (Seed + Série A), menée par Pantera Capital, avec un panel d'investisseurs regroupant les acteurs technologiques et financiers les plus influents au monde :
-
L'écosystème technologique et financier occidental : Ribbit, Coinbase Ventures, DCG, Lightspeed Faction, Anagram, Pi Network Ventures, Topology, Primitive Ventures et Amber Group, tous experts historiques des infrastructures cryptographiques et d'IA, misent sur le paradigme fondamental de l’« économie des agents intelligents et de l'internet des machines » ;
-
L'énergie industrielle orientale : Sequoia China, spécialiste de la chaîne d'approvisionnement et du système de fabrication robotique, comprend parfaitement les difficultés et seuils critiques liés à la production et à la livraison à grande échelle d’un robot.
Parallèlement, OpenMind entretient des échanges étroits avec des acteurs traditionnels des marchés financiers comme KraneShares, afin d'explorer ensemble des voies intégrant la valeur à long terme des « robots + agents intelligents » dans des produits financiers structurés, réalisant ainsi une double connectivité entre crypto et bourse. En juin 2025, lors du lancement par KraneShares du premier ETF mondial sur les indices des robots humanoïdes et de l’intelligence incarnée (KOID), c’est le robot humanoïde « Iris », personnalisé conjointement par OpenMind et RoboStore, qui a frappé la cloche d'ouverture à la Bourse de New York, marquant la première fois dans l'histoire des bourses qu'un tel rituel est accompli par un robot humanoïde.
Comme l’a souligné Nihal Maunder, associé chez Pantera Capital :
« Si nous voulons que les machines intelligentes fonctionnent dans un environnement ouvert, nous avons besoin d’un réseau intelligent ouvert. Ce que OpenMind fait pour les robots, Linux l’a fait pour les logiciels, Ethereum pour la blockchain. »
Équipe et conseillers : du laboratoire à la chaîne de production
Le fondateur d'OpenMind, Jan Liphardt, est professeur adjoint à l’université Stanford et ancien professeur à Berkeley, spécialiste de longue date des données et des systèmes distribués, avec une forte expertise académique et technique. Il prône la réutilisation open source, remplace les boîtes noires par des mécanismes auditable et traçable, et intègre l'IA, la robotique et la cryptographie selon une approche pluridisciplinaire.
L’équipe centrale d'OpenMind provient d’institutions comme OKX Ventures, Oxford Robotics Institute, Palantir, Databricks, Perplexity, couvrant les domaines clés que sont le contrôle, la perception et la navigation robotiques, l’ordonnancement multimodal et des grands modèles linguistiques (LLM), les systèmes distribués et les protocoles blockchain. Par ailleurs, une équipe de conseillers composée d'experts académiques et industriels (comme Steve Cousins, responsable robotique à Stanford, Bill Roscoe du centre blockchain d'Oxford, Alessio Lomuscio, professeur d'IA sécurisée à Imperial College) garantit la « sécurité, conformité et fiabilité » des robots.
La solution OpenMind : deux couches, un seul ordre
OpenMind a construit une infrastructure réutilisable permettant aux robots de collaborer et d’échanger des informations indépendamment des appareils, des fabricants, voire des frontières nationales :
-
Côté appareil : Fournit OM1, un système d'exploitation nativement conçu pour l'IA destiné aux robots physiques, reliant en boucle fermée l’ensemble de la chaîne allant de la perception à l’exécution, permettant à des robots de formes diverses de comprendre leur environnement et d’accomplir des tâches ;
-
Côté réseau : Construit le réseau de collaboration décentralisé FABRIC, offrant des mécanismes d’identité, d’attribution des tâches et de communication, garantissant que les robots puissent s’identifier mutuellement, attribuer des tâches et partager leur état pendant la collaboration.
Cette combinaison « système d’exploitation + couche réseau » permet aux robots non seulement d’agir individuellement, mais aussi de coopérer, synchroniser leurs processus et accomplir ensemble des tâches complexes au sein d’un même réseau collaboratif unifié.
OM1 : un système d'exploitation natif pour l'IA dans le monde physique
Tout comme un smartphone a besoin d'iOS ou Android pour exécuter des applications, les robots ont besoin d’un système d’exploitation pour exécuter des modèles d’IA, traiter les données des capteurs, prendre des décisions et effectuer des actions.
OM1 a été conçu pour cela : c’est un système d’exploitation natif pour l’IA destiné aux robots du monde réel, leur permettant de percevoir, comprendre, planifier et accomplir des tâches dans divers environnements. Contrairement aux systèmes de contrôle robotiques traditionnels et fermés, OM1 est open source, modulaire et indépendant du matériel (hardware-agnostic), pouvant s’exécuter sur des robots humanoïdes, quadrupèdes, à roues ou des bras mécaniques.
Quatre étapes clés : de la perception à l'exécution
OM1 décompose l’intelligence robotique en quatre étapes générales : Perception (perception) → Memory (mémoire) → Planning (planification) → Action (action). Ce flux est entièrement modularisé par OM1 et interconnecté via un langage de données unifié, permettant de construire des capacités d’intelligence combinables, interchangeables et vérifiables.
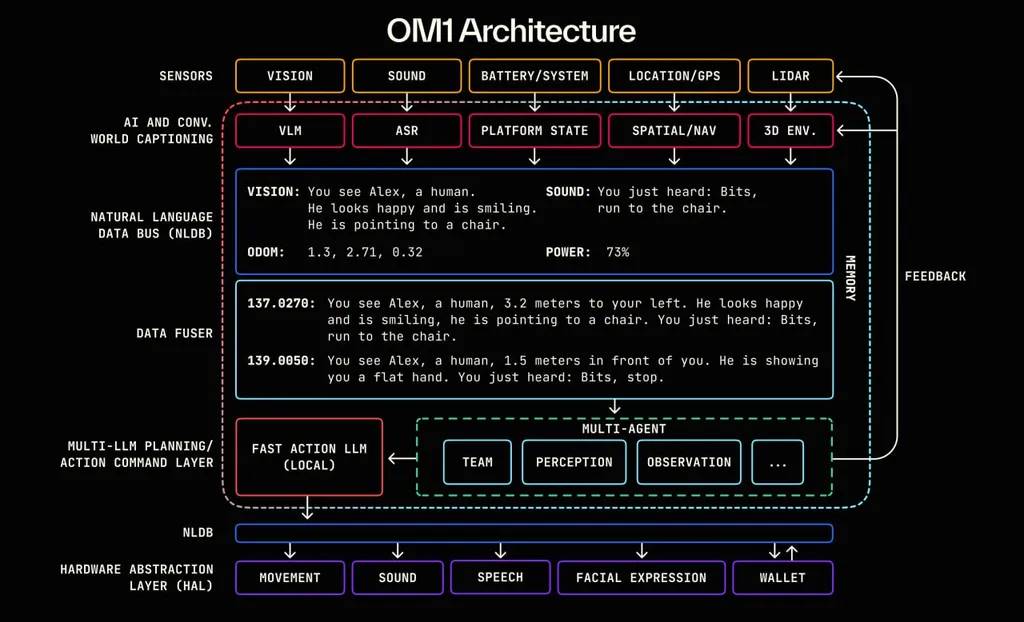
Architecture d'OM1
À un niveau architectural, OM1 comporte sept couches :
-
Couche des capteurs (Sensor Layer) : collecte les informations via caméras, LIDAR, microphones, état de la batterie, GPS, etc., en entrée multimodale.
-
Couche IA + description du monde (AI + World Captioning Layer) : transforme les données visuelles, vocales et d’état en descriptions en langage naturel (ex. : « vous voyez une personne qui fait signe »).
-
Bus de données en langage naturel (Natural Language Data Bus) : toutes les perceptions sont converties en fragments linguistiques horodatés, transmis entre modules.
-
Fuseur de données (Data Fuser) : intègre plusieurs sources d’entrée pour générer un contexte complet (prompt) servant à la prise de décision.
-
Couche de planification/décision multi-IA (Multi-AI Planning/Decision Layer) : plusieurs LLM lisent le contexte et génèrent un plan d’action combiné aux règles blockchain.
-
Canal descendant NLDB : transmet les décisions via une couche intermédiaire linguistique au système d’exécution matériel.
-
Couche d'abstraction matérielle (Hardware Abstraction Layer) : convertit les instructions linguistiques en commandes bas niveau pilotant le matériel (déplacement, annonce vocale, transaction, etc.).
Mise en œuvre rapide, déploiement large
Pour permettre à une idée de devenir rapidement une tâche exécutée par un robot, OM1 intègre les outils suivants :
-
Ajout rapide de nouvelles compétences : grâce au langage naturel et aux grands modèles, ajouter un nouveau comportement prend quelques heures, contre plusieurs mois de codage dur.
-
Combinaison multimodale : fusion facile des perceptions LiDAR, visuelles, sonores, sans que les développeurs aient à écrire eux-mêmes une logique complexe de fusion de capteurs.
-
Interfaces préconfigurées avec grands modèles : intégration native de GPT-4o, DeepSeek, VLMs, etc., prenant en charge l’interaction vocale.
-
Compatibilité logicielle et matérielle étendue : support des protocoles principaux comme ROS2, Cyclone DDS, intégration transparente avec les intergiciels robotiques existants. Fonctionne directement avec Unitree G1, Go2, Turtlebot ou des bras mécaniques.
-
Intégration avec FABRIC : OM1 prend nativement en charge l’identité, la coordination des tâches et les paiements blockchain, permettant aux robots non seulement d’accomplir des tâches isolément, mais aussi de participer à un réseau de collaboration mondial.
Actuellement, OM1 est déjà déployé dans plusieurs scénarios réels :
-
Frenchie (robot chien quadrupède Unitree Go2) : a accompli des missions complexes lors de la démonstration technologique de défense USS Hornet 2024.
-
Iris (robot humanoïde Unitree G1) : a présenté une démonstration d’interaction homme-machine en direct au stand Coinbase à EthDenver 2025, et devrait intégrer les programmes éducatifs des universités américaines via le projet pédagogique de RoboStore.
FABRIC : le réseau décentralisé de collaboration homme-machine
Même dotés d’un cerveau puissant, si les robots ne peuvent pas collaborer de manière sûre et fiable entre eux, ils resteront isolés. Dans la réalité, chaque fabricant construit souvent son propre système fermé, empêchant le partage de compétences et de données ; la collaboration inter-marques ou internationale manque encore davantage d’identité fiable et de règles normalisées. Cela crée plusieurs problèmes :
-
Preuve d'identité et de localisation : comment un robot peut-il prouver qui il est, où il se trouve et ce qu’il fait ?
-
Partage de compétences et de données : comment autoriser le partage de données ou l’appel à des compétences ?
-
Définition du contrôle : comment définir la fréquence, la portée d’utilisation d’une compétence et les conditions de retour des données ?
FABRIC a été conçu précisément pour résoudre ces problèmes. C’est le réseau de collaboration homme-machine décentralisé créé par OpenMind, fournissant une infrastructure unifiée pour l’identité, les tâches, la communication et les règlements entre robots et systèmes intelligents. On peut le voir comme :
-
Un GPS : permet aux robots de savoir où ils sont, s’ils sont proches et aptes à collaborer ;
-
Un VPN : permet une connexion directe et sécurisée entre robots, sans IP publique ni configuration réseau complexe ;
-
Un système de planification de tâches : publie, reçoit et enregistre automatiquement tout le processus d’exécution des tâches.
Principaux cas d'utilisation
FABRIC peut déjà s’adapter à de nombreux cas pratiques, notamment :
-
Télécommande et surveillance à distance : contrôler un robot en toute sécurité depuis n’importe où, sans réseau dédié.
-
Marché Robot-as-a-Service : appeler un robot comme on appelle un taxi, pour effectuer du nettoyage, des inspections ou des livraisons.
-
Cartographie participative et collecte de données : flottes ou robots transmettent en temps réel trafic, obstacles et changements d’environnement, générant des cartes haute précision partageables.
-
Numérisation/mesure à la demande : mobiliser temporairement des robots à proximité pour réaliser une modélisation 3D, un levé topographique ou recueillir des preuves dans un contexte d’assurance.
FABRIC rend vérifiable et traçable « qui fait quoi, où et ce qui est accompli », tout en définissant clairement les limites des appels de compétences et de l’exécution des tâches.
À long terme, FABRIC deviendra l’App Store de l’intelligence machine : les compétences pourront être appelées mondialement sous licence, les données générées nourriront les modèles, faisant ainsi évoluer continuellement le réseau de collaboration.
Web3 inscrit l'« ouverture » dans la société des machines
Dans la réalité, l’industrie robotique tend à se concentrer : quelques plateformes maîtrisent le matériel, les algorithmes et les réseaux, bloquant l’innovation extérieure. La décentralisation permet, quel que soit le fabricant ou le pays d’opération, aux robots de coopérer, échanger des compétences et régler leurs services dans un réseau ouvert, sans dépendre d’une seule plateforme.
OpenMind utilise l’infrastructure blockchain pour formaliser les règles de collaboration, les permissions d’accès aux compétences et les modalités de rémunération en un « ordre réseau » public, vérifiable et améliorable.
-
Identité vérifiable : chaque robot et opérateur enregistre sur la blockchain une identité unique (norme ERC-7777), dont les caractéristiques matérielles, responsabilités et niveaux d’autorisation sont transparents et consultables.
-
Attribution publique des tâches : les tâches ne sont pas attribuées dans une boîte noire fermée, mais publiées, mises aux enchères et jumelées selon des règles publiques ; tout processus de collaboration génère une preuve cryptographique horodatée et géolocalisée, stockée sur la blockchain.
-
Règlement et partage automatisés : après exécution, le partage des revenus, les assurances et les dépôts de garantie sont exécutés automatiquement, et tout participant peut vérifier les résultats en temps réel.
-
Circulation libre des compétences : les nouvelles compétences peuvent être configurées via des contrats blockchain (nombre d’appels, équipements compatibles, etc.), protégeant ainsi la propriété intellectuelle tout en permettant une circulation mondiale.
C’est un ordre de collaboration que tous peuvent utiliser, surveiller et améliorer. Pour les utilisateurs Web3, cela signifie que l’économie robotique possède dès sa naissance des gènes anti-monopole, composable et vérifiable — ce n’est pas seulement une opportunité sectorielle, mais une chance d’inscrire l’« ouverture » dans les fondations mêmes de la société des machines.
Faire sortir l'intelligence incarnée de son îlot
Que ce soit pour faire des rondes dans les hôpitaux, apprendre de nouvelles compétences à l’école ou inspecter et modéliser des quartiers urbains, les robots sortent progressivement des « vitrines de démonstration » pour devenir des composantes stables de la division du travail humain. Ils fonctionnent 24H/24, respectent les règles, ont mémoire et compétences, et collaborent naturellement avec les humains et d'autres machines.
Pour que ces scénarios soient vraiment déployés à grande échelle, il ne suffit pas de machines plus intelligentes : il faut un ordre fondamental permettant aux robots de s’accorder mutuellement confiance, d’échanger et de collaborer. OpenMind a déjà posé les premières « fondations » de cette voie grâce à OM1 et FABRIC : le premier permet aux robots de comprendre réellement le monde et d’agir de façon autonome, le second fait circuler ces capacités dans un réseau mondial. Il reste maintenant à étendre cette route vers davantage de villes et réseaux, pour que les machines deviennent des partenaires fiables et durables du réseau social.
La feuille de route d'OpenMind est claire :
Court terme : finaliser le prototype fonctionnel d’OM1 et la version initiale (MVP) de FABRIC, lancer l’identité blockchain et les capacités de base de collaboration ;
Moyen terme : déployer OM1 et FABRIC dans l’éducation, les foyers et les entreprises, connecter les premiers nœuds et rassembler une communauté de développeurs ;
Long terme : faire d’OM1 et FABRIC des standards mondiaux, permettant à tout robot de rejoindre ce réseau ouvert de collaboration comme on se connecte à Internet, et former une économie robotique mondiale durable.
À l’ère Web2, les robots étaient verrouillés dans des systèmes fermés d’un seul fabricant, leurs fonctions et données incapables de circuler entre plates-formes. Dans le monde construit par OpenMind, ils sont des nœuds égaux d’un réseau ouvert : capables de rejoindre librement, d’apprendre, de collaborer et de régler leurs échanges, constituant avec les humains une société globale de machines interconnectées et dignes de confiance. OpenMind fournit précisément la puissante capacité qui rend cette transformation scalable.
Bienvenue dans la communauté officielle TechFlow
Groupe Telegram :https://t.me/TechFlowDaily
Compte Twitter officiel :https://x.com/TechFlowPost
Compte Twitter anglais :https://x.com/BlockFlow_News