
Hiểu rõ OpenMind trong một bài viết: Xây dựng hệ điều hành toàn cầu và mạng lưới tin cậy cho trí tuệ thể hiện
Tuyển chọn TechFlowTuyển chọn TechFlow
Hiểu rõ OpenMind trong một bài viết: Xây dựng hệ điều hành toàn cầu và mạng lưới tin cậy cho trí tuệ thể hiện
OpenMind đang xây dựng hệ điều hành chung cho robot, cho phép robot không chỉ cảm nhận và hành động mà còn có thể hợp tác an toàn và quy mô trong mọi môi trường thông qua cộng tác phi tập trung.
Tại sao cần một thời đại robot mở
Trong vòng 5–8 năm tới, số lượng robot trên Trái đất sẽ vượt ngưỡng 1 tỷ chiếc — đây là bước ngoặt khi chúng chuyển từ "trình diễn đơn lẻ" sang "phân công xã hội". Robot sẽ không chỉ còn là những cánh tay cơ khí trên dây chuyền sản xuất, mà là những "đồng nghiệp, giáo viên và người bạn" có khả năng cảm nhận, hiểu biết, ra quyết định và hợp tác cùng con người.
Những năm gần đây, phần cứng robot phát triển nhanh như cơ bắp ngày càng mạnh mẽ, với bàn tay linh hoạt hơn, bước đi vững chắc hơn và cảm biến phong phú hơn. Nhưng điểm nghẽn thực sự không nằm ở kim loại hay động cơ, mà ở việc làm sao để trang bị cho chúng tâm trí chia sẻ và hợp tác:
-
Phần mềm của các nhà sản xuất khác nhau không tương thích, khiến robot không thể chia sẻ kỹ năng và trí tuệ;
-
Logic ra quyết định bị khóa trong hệ thống khép kín, bên ngoài không thể xác minh hay tối ưu hóa;
-
Kiến trúc điều khiển tập trung đồng nghĩa với tốc độ đổi mới bị giới hạn và chi phí tin cậy cao.
Sự chia cắt này khiến ngành công nghiệp robot khó chuyển hóa thành quả từ mô hình AI thành năng suất có thể nhân rộng: demo robot đơn lẻ thì liên tục xuất hiện, nhưng thiếu khả năng di chuyển chéo thiết bị, ra quyết định có thể kiểm chứng và hợp tác chuẩn hóa, do đó không thể mở rộng quy mô. Và OpenMind chính là giải pháp cho "chặng đường cuối cùng" này. Mục tiêu của chúng tôi không phải chế tạo một robot biết nhảy tốt hơn, mà là cung cấp nền tảng phần mềm thống nhất và tiêu chuẩn hợp tác cho hàng tỷ robot dị biệt trên toàn cầu:
-
Cho phép robot hiểu được ngữ cảnh và học hỏi lẫn nhau;
-
Cho phép các nhà phát triển nhanh chóng xây dựng ứng dụng trên kiến trúc mã nguồn mở, mô-đun;
-
Cho phép con người và máy móc hợp tác an toàn và thanh toán dưới quy tắc phi tập trung.
Tóm lại một câu, OpenMind đang xây dựng hệ điều hành phổ quát cho robot, giúp robot không chỉ cảm nhận và hành động, mà còn có thể hợp tác an toàn và quy mô lớn thông qua cộng tác phi tập trung trong mọi môi trường.
Ai đang đặt cược vào con đường này: 20 triệu USD gọi vốn và dàn lực lượng toàn cầu
Hiện tại, OpenMind đã hoàn tất gọi vốn 20 triệu USD (vòng Hạt giống + Vòng A), do Pantera Capital dẫn đầu, với sự tham gia của các lực lượng công nghệ và tài chính hàng đầu thế giới:
-
Hệ sinh thái công nghệ và vốn phương Tây: Ribbit, Coinbase Ventures, DCG, Lightspeed Faction, Anagram, Pi Network Ventures, Topology, Primitive Ventures và Amber Group… những đơn vị này lâu nay chuyên sâu về hạ tầng mã hóa và AI, đặt cược vào mô hình nền tảng cho "nền kinh tế tác nhân và mạng lưới máy móc";
-
Năng lượng sản xuất phương Đông: Sequoia China và các đơn vị khác am hiểu chuỗi cung ứng và hệ thống sản xuất robot, nắm rõ toàn bộ độ khó và rào cản trong việc "sản xuất một cỗ máy và giao hàng quy mô lớn";
Đồng thời, OpenMind cũng duy trì trao đổi chặt chẽ với các đối tác thị trường vốn truyền thống như KraneShares, cùng nhau khám phá cách đưa giá trị dài hạn của "robot + tác nhân thông minh" vào các sản phẩm tài chính cấu trúc, nhằm hiện thực hóa kết nối hai chiều giữa tiền mã hóa và cổ phiếu. Vào tháng 6 năm 2025, khi KraneShares ra mắt quỹ ETF toàn cầu về robot hình người và trí tuệ cụ thể (KOID), họ đã chọn robot hình người “Iris” do OpenMind và RoboStore cùng tùy chỉnh để đánh chuông khai mạc tại Nasdaq — đây cũng là lần đầu tiên trong lịch sử sở giao dịch, một robot hình người thực hiện nghi lễ này.
Giống như Nihal Meunder, đối tác tại Pantera Capital từng nói:
"Nếu chúng ta mong muốn máy móc thông minh vận hành trong môi trường mở, thì cần một mạng lưới trí tuệ mở. Điều mà OpenMind đang làm cho robot cũng giống như Linux với phần mềm, hay Ethereum với blockchain."
Đội ngũ và cố vấn: Từ phòng thí nghiệm đến dây chuyền sản xuất
Người sáng lập OpenMind, Jan Liphardt, là phó giáo sư Đại học Stanford, từng là giáo sư tại Berkeley, chuyên nghiên cứu dữ liệu và hệ thống phân tán, có bề dày cả trong học thuật lẫn kỹ thuật. Ông chủ trương thúc đẩy mã nguồn mở, tái sử dụng, thay thế hộp đen bằng cơ chế có thể kiểm toán và truy vết, đồng thời kết hợp AI theo phương pháp liên ngành với robot và mật mã học.
Đội ngũ cốt lõi của OpenMind đến từ các tổ chức như OKX Ventures, Oxford Robotics Institute, Palantir, Databricks, Perplexity, bao quát các khâu then chốt như điều khiển robot, cảm nhận và định vị, lập lịch đa phương thức và LLM, hệ thống phân tán và giao thức trên chuỗi. Đồng thời, một đội ngũ cố vấn gồm các chuyên gia học thuật và công nghiệp (như Steve Cousins – người đứng đầu robot Stanford, Bill Roscoe – Trung tâm Blockchain Oxford, giáo sư Alessio Lomuscio về AI an toàn tại Imperial College) đảm bảo yếu tố "an toàn, tuân thủ, đáng tin cậy" cho robot.
Giải pháp của OpenMind: Hai tầng kiến trúc, một hệ thống trật tự
OpenMind xây dựng một cơ sở hạ tầng có thể tái sử dụng, cho phép robot hợp tác và trao đổi thông tin xuyên thiết bị, xuyên nhà sản xuất và thậm chí xuyên quốc gia:
-
Phía thiết bị: Cung cấp hệ điều hành gốc AI OM1 dành cho robot vật lý, kết nối toàn bộ quy trình từ cảm nhận đến thực thi thành một vòng khép kín, giúp mọi dạng robot đều có thể hiểu môi trường và hoàn thành nhiệm vụ;
-
Phía mạng lưới: Xây dựng mạng lưới cộng tác phi tập trung FABRIC, cung cấp cơ chế định danh, phân bổ nhiệm vụ và truyền thông, đảm bảo robot có thể nhận diện nhau, phân công nhiệm vụ và chia sẻ trạng thái khi hợp tác.
Tổ hợp "hệ điều hành + lớp mạng" này giúp các robot không chỉ hành động riêng lẻ, mà còn phối hợp lẫn nhau, đồng bộ quy trình và cùng hoàn thành nhiệm vụ phức tạp trong một mạng lưới cộng tác thống nhất.
OM1: Hệ điều hành gốc AI dành cho thế giới thực
Cũng như điện thoại cần iOS hoặc Android để chạy ứng dụng, robot cũng cần một hệ điều hành để vận hành mô hình AI, xử lý dữ liệu cảm biến, ra quyết định suy luận và thực thi hành động.
OM1 ra đời vì mục đích đó — một hệ điều hành gốc AI dành cho robot hoạt động trong thế giới thực, giúp chúng cảm nhận, hiểu biết, lập kế hoạch và hoàn thành nhiệm vụ trong nhiều môi trường khác nhau. Khác với các hệ thống điều khiển robot truyền thống, đóng kín, OM1 là mã nguồn mở, mô-đun và độc lập phần cứng (hardware-agnostic), có thể vận hành trên nhiều hình thái như robot hình người, bốn chân, bánh xe, cánh tay cơ khí.
Bốn khâu cốt lõi: Từ cảm nhận đến thực thi
OM1 chia trí tuệ robot thành bốn bước phổ quát: Perception (Cảm nhận) → Memory (Bộ nhớ) → Planning (Lập kế hoạch) → Action (Thực thi). Quy trình này được OM1 mô-đun hóa hoàn chỉnh và kết nối bằng ngôn ngữ dữ liệu thống nhất, tạo nên khả năng xây dựng trí tuệ có thể tổ hợp, thay thế và kiểm chứng.
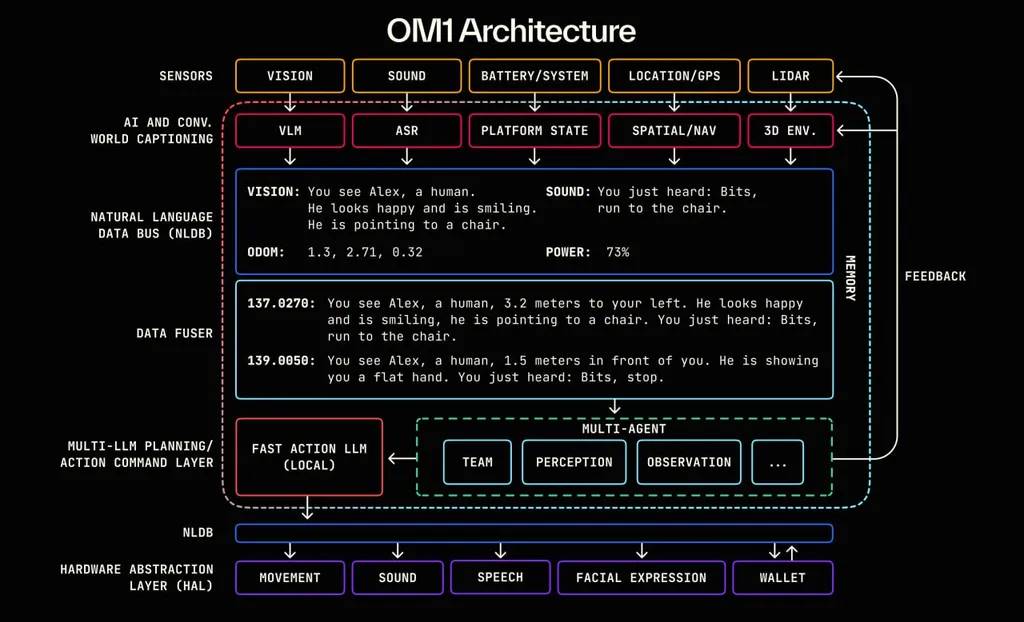
Kiến trúc của OM1
Cụ thể về kiến trúc, OM1 gồm bảy lớp như sau:
-
Lớp cảm biến (Sensor Layer) thu thập thông tin: Camera, LIDAR, micro, trạng thái pin, GPS và các đầu vào đa phương thức khác.
-
Lớp AI + Chú thích thế giới (World Captioning Layer) dịch thông tin: Mô hình đa phương thức chuyển hình ảnh, giọng nói, trạng thái thành mô tả ngôn ngữ tự nhiên (ví dụ: “bạn thấy một người đang vẫy tay”).
-
Xe buýt dữ liệu ngôn ngữ tự nhiên (Natural Language Data Bus) truyền thông tin: Mọi dữ liệu cảm nhận được chuyển thành đoạn văn bản có dấu thời gian, truyền giữa các mô-đun.
-
Lớp hợp nhất dữ liệu (Data Fuser) kết hợp thông tin: Tổng hợp nhiều nguồn đầu vào, tạo ngữ cảnh đầy đủ (prompt) phục vụ ra quyết định.
-
Lớp lập kế hoạch/ra quyết định đa AI (Multi-AI Planning/Decision Layer) tạo ra quyết định: Nhiều LLM đọc ngữ cảnh, kết hợp quy tắc trên chuỗi để tạo kế hoạch hành động.
-
Kênh xuống NLDB: Truyền kết quả quyết định qua lớp trung gian ngôn ngữ đến hệ thống thực thi phần cứng.
-
Lớp trừu tượng phần cứng (Hardware Abstraction Layer) thực hiện hành động: Chuyển lệnh ngôn ngữ thành lệnh điều khiển底层, điều khiển phần cứng thực thi (di chuyển, phát âm thanh, giao dịch...).
Dễ tiếp cận, ứng dụng rộng rãi
Để một ý tưởng nhanh chóng trở thành nhiệm vụ do robot thực thi, OM1 tích hợp sẵn các công cụ sau:
-
Thêm nhanh kỹ năng mới: Chỉ dùng ngôn ngữ tự nhiên và mô hình lớn, có thể thêm hành vi mới cho robot trong vài giờ thay vì hàng tháng viết mã cứng.
-
Kết hợp đa phương thức: Dễ dàng tích hợp cảm nhận LiDAR, hình ảnh, âm thanh… giúp nhà phát triển không cần tự viết logic hợp nhất cảm biến phức tạp.
-
Giao diện mô hình lớn đã cấu hình sẵn: Tích hợp sẵn các mô hình ngôn ngữ/hình ảnh như GPT-4o, DeepSeek, VLMs, hỗ trợ tương tác bằng giọng nói.
-
Tương thích rộng rãi về phần mềm và phần cứng: Hỗ trợ các giao thức phổ biến như ROS2, Cyclone DDS, tích hợp liền mạch với phần mềm trung gian robot hiện có. Bất kể là Unitree G1 hình người, Go2 bốn chân hay Turtlebot, cánh tay cơ khí, đều có thể kết nối trực tiếp.
-
Kết nối với FABRIC: OM1 hỗ trợ sẵn định danh, điều phối nhiệm vụ và thanh toán trên chuỗi, giúp robot không chỉ hoàn thành nhiệm vụ đơn lẻ mà còn tham gia mạng lưới cộng tác toàn cầu.
Hiện tại, OM1 đã được triển khai trong nhiều tình huống thực tế:
-
Frenchie (chó robot bốn chân Unitree Go2): Hoàn thành nhiệm vụ địa hình phức tạp tại triển lãm công nghệ quốc phòng USS Hornet 2024.
-
Iris (robot hình người Unitree G1): Trình diễn tương tác người - máy tại gian hàng Coinbase ở EthDenver 2025, và dự kiến sẽ tham gia chương trình giáo dục của RoboStore để đưa vào giảng dạy tại các trường đại học khắp nước Mỹ.
FABRIC: Mạng lưới cộng tác người - máy phi tập trung
Dù có bộ não mạnh mẽ, nếu robot không thể cộng tác an toàn và đáng tin cậy với nhau, chúng vẫn chỉ có thể chiến đấu riêng lẻ. Trên thực tế, robot của các hãng khác nhau thường tự xây hệ thống, tự quản lý, không chia sẻ được kỹ năng và dữ liệu; việc cộng tác xuyên thương hiệu hay xuyên quốc gia còn thiếu vắng định danh đáng tin và quy tắc chuẩn. Từ đó nảy sinh một số vấn đề:
-
Chứng minh định danh và vị trí: Làm sao robot chứng minh được nó là ai, ở đâu, đang làm gì?
-
Chia sẻ kỹ năng và dữ liệu: Làm thế nào ủy quyền cho robot chia sẻ dữ liệu, gọi kỹ năng?
-
Xác định quyền điều khiển: Làm sao thiết lập tần suất, phạm vi sử dụng kỹ năng và điều kiện phản hồi dữ liệu?
FABRIC được thiết kế để giải quyết những vấn đề này. Đây là mạng lưới cộng tác người - máy phi tập trung do OpenMind phát triển, cung cấp hạ tầng thống nhất về định danh, nhiệm vụ, truyền thông và thanh toán cho robot và các hệ thống thông minh. Bạn có thể hình dung nó như:
-
Một GPS, giúp robot biết nhau đang ở đâu, có gần nhau, có phù hợp cộng tác hay không;
-
Một VPN, cho phép các robot kết nối trực tiếp an toàn, không cần IP công cộng hay cấu hình mạng phức tạp;
-
Một hệ thống lập lịch nhiệm vụ, tự động đăng, nhận và ghi lại toàn bộ quá trình thực thi nhiệm vụ.
Các ứng dụng chính
FABRIC hiện đã có thể áp dụng cho nhiều tình huống thiết thực, bao gồm nhưng không giới hạn:
-
Điều khiển và giám sát từ xa: Điều khiển robot an toàn từ bất kỳ đâu, không cần mạng chuyên dụng.
-
Thị trường Robot-as-a-Service: Gọi robot như gọi xe, để hoàn thành các công việc như vệ sinh, tuần tra, giao hàng.
-
Thu thập bản đồ và dữ liệu cộng tác: Đội xe hoặc robot tải lên trạng thái đường sá, vật cản, thay đổi môi trường theo thời gian thực, tạo bản đồ độ phân giải cao có thể chia sẻ.
-
Quét/đo đạc theo nhu cầu: Gọi tạm thời các robot gần đó để thực hiện mô hình 3D, đo đạc công trình hoặc thu thập bằng chứng trong các tình huống bảo hiểm.
FABRIC giúp "ai đang làm gì, ở đâu, hoàn thành thế nào" đều có thể xác minh và truy vết, đồng thời việc gọi kỹ năng và thực thi nhiệm vụ có ranh giới rõ ràng.
Xa hơn nữa, FABRIC sẽ trở thành App Store cho trí tuệ máy móc: kỹ năng có thể được cấp phép và gọi trên toàn cầu, dữ liệu tạo ra từ việc gọi kỹ năng sẽ nuôi dưỡng lại mô hình, thúc đẩy mạng lưới cộng tác tiến hóa liên tục.
Web3 đang viết chữ “mở” vào xã hội máy móc
Trên thực tế, ngành robot đang ngày càng tập trung, một vài nền tảng nắm giữ phần cứng, thuật toán và mạng lưới, chặn đứng đổi mới từ bên ngoài. Ý nghĩa của tính phi tập trung nằm ở chỗ, bất kể robot do ai sản xuất hay vận hành ở quốc gia nào, chúng đều có thể cộng tác, trao đổi kỹ năng và thanh toán thù lao trong một mạng lưới mở, mà không cần lệ thuộc vào một nền tảng đơn lẻ nào.
OpenMind sử dụng hạ tầng trên chuỗi để ghi lại các quy tắc cộng tác, quyền truy cập kỹ năng và cách phân phối thù lao thành một "trật tự mạng" công khai, có thể xác minh và cải tiến
-
Định danh có thể xác minh: Mỗi robot và mỗi người vận hành sẽ đăng ký định danh duy nhất trên chuỗi (tiêu chuẩn ERC-7777), đặc điểm phần cứng, phạm vi trách nhiệm, cấp độ quyền hạn đều minh bạch, dễ kiểm tra.
-
Phân bổ nhiệm vụ công khai: Nhiệm vụ không được phân bổ trong hộp đen khép kín, mà được đăng, đấu giá, ghép nối theo quy tắc công khai; toàn bộ quá trình cộng tác tạo ra bằng chứng mã hóa kèm thời gian và vị trí, được lưu chứng trên chuỗi.
-
Thanh toán và chia lợi nhuận tự động: Sau khi hoàn thành nhiệm vụ, việc chia lợi nhuận, bảo hiểm, hoàn trả hoặc khấu trừ tiền đặt cọc sẽ thực hiện tự động, bất kỳ bên tham gia nào cũng có thể xác minh kết quả ngay lập tức.
-
Kỹ năng lưu thông tự do: Kỹ năng mới có thể thiết lập số lần gọi, thiết bị áp dụng qua hợp đồng trên chuỗi, vừa bảo vệ quyền sở hữu trí tuệ, vừa cho phép kỹ năng lưu thông tự do toàn cầu.
Đây là một trật tự cộng tác mà mọi người tham gia đều có thể sử dụng, giám sát và cải tiến. Với người dùng Web3, điều này có nghĩa là nền kinh tế robot từ lúc hình thành đã mang gen chống độc quyền, có thể tổ hợp và kiểm chứng — đây không chỉ là một cơ hội đầu tư, mà còn là cơ hội để khắc sâu chữ “mở” vào nền tảng xã hội máy móc.
Giúp trí tuệ cụ thể thoát khỏi hòn đảo cô lập
Dù đang tuần tra phòng bệnh trong bệnh viện, học kỹ năng mới tại trường học, hay hoàn thành nhiệm vụ tuần tra và lập mô hình trên phố phường, robot đang dần thoát khỏi "gian trưng bày", trở thành thành phần ổn định trong phân công lao động hàng ngày của con người. Chúng hoạt động 24/7, tuân thủ quy tắc, có trí nhớ và kỹ năng, đồng thời có thể hợp tác tự nhiên với con người và các máy móc khác.
Để những tình huống này thực sự được nhân rộng, điều cần phía sau không chỉ là những cỗ máy thông minh hơn, mà còn là một trật tự nền tảng giúp chúng tin tưởng, kết nối và cộng tác lẫn nhau. OpenMind đã đặt những viên gạch đầu tiên của con đường này bằng OM1 và FABRIC: cái trước giúp robot thực sự hiểu thế giới và hành động độc lập, cái sau giúp những năng lực này lưu thông trong mạng lưới toàn cầu. Tiếp theo, là kéo dài con đường này đến nhiều thành phố và mạng lưới hơn nữa, biến máy móc thành những đối tác đáng tin cậy lâu dài trong mạng xã hội.
Con đường của OpenMind rất rõ ràng:
Ngắn hạn: Hoàn thiện mẫu thử nghiệm chức năng cốt lõi OM1 và MVP FABRIC, ra mắt định danh trên chuỗi và khả năng cộng tác cơ bản;
Trung hạn: Triển khai OM1 và FABRIC trong giáo dục, gia đình, doanh nghiệp, kết nối các nút sớm, tập hợp cộng đồng nhà phát triển;
Dài hạn: Biến OM1 và FABRIC thành tiêu chuẩn toàn cầu, giúp mọi máy móc đều có thể kết nối vào mạng lưới cộng tác robot mở như cách kết nối Internet, từ đó hình thành nền kinh tế máy móc toàn cầu vận hành bền vững.
Trong thời đại Web2, robot thường bị khóa trong hệ thống khép kín của một nhà sản xuất đơn lẻ, chức năng và dữ liệu không thể lưu thông xuyên nền tảng; còn trong thế giới do OpenMind xây dựng, chúng là các nút bình đẳng trên mạng lưới mở: có thể tự do tham gia, học hỏi, cộng tác và thanh toán, cùng con người tạo nên một xã hội máy móc kết nối đáng tin cậy trên toàn cầu. Điều mà OpenMind cung cấp chính là năng lực mạnh mẽ giúp sự chuyển đổi này có thể được nhân rộng quy mô.
Chào mừng tham gia cộng đồng chính thức TechFlow
Nhóm Telegram:https://t.me/TechFlowDaily
Tài khoản Twitter chính thức:https://x.com/TechFlowPost
Tài khoản Twitter tiếng Anh:https://x.com/BlockFlow_News













