1記事でOpenMindを理解する:具現知能のためのグローバルOSおよび信頼ネットワークの構築
TechFlow厳選深潮セレクト
1記事でOpenMindを理解する:具現知能のためのグローバルOSおよび信頼ネットワークの構築
OpenMindは、ロボットが環境を認識して行動するだけでなく、非中央集権的な協働を通じてあらゆる環境下で安全かつ大規模に協力できるような、ロボット汎用オペレーティングシステムを構築しています。
オープンなロボット時代が必要な理由
今後5〜8年で、地球上のロボット数は10億台を突破し、「単体デモ」から「社会的分業」への転換点を迎える。ロボットは単なる生産ライン上の機械アームではなく、感知・理解・意思決定ができ、人間と協働する「同僚、教師、パートナー」となる。
近年、ロボットハードウェアは筋肉のように急速に進化し、より器用な手、安定した歩行、豊富なセンサーを備えている。しかし真のボトルネックは金属やモーターではなく、共有と協働の知性をいかに持たせるかにある:
-
各メーカーのソフトウェアは互換性がなく、ロボット間でスキルや知能を共有できない;
-
意思決定ロジックはクローズドシステムに閉じ込められ、外部からの検証や最適化ができない;
-
中央集権的な制御アーキテクチャは、イノベーション速度の制限と高い信頼コストを意味する。
この分断により、ロボット産業はAIモデルの進歩を再現可能な生産力に転換しにくい:ロボットの単体デモは次々と登場するが、デバイス間での移行、検証可能な意思決定、標準化された協働が欠如しており、スケール化が困難だ。OpenMindが解決しようとしているのは、まさにこの「ラストワンマイル」である。私たちの目標は、より上手に踊るロボットを作ることではなく、世界中の膨大な異種ロボットに統一されたソフトウェア基盤と協働標準を提供することだ:
-
ロボットに文脈を理解し、互いに学習する能力を持たせる;
-
開発者がオープンソースでモジュール化されたアーキテクチャ上で迅速にアプリケーションを構築できるようにする;
-
人間と機械が分散型のルール下で安全に協働・決済できるようにする。
一言で言えば、OpenMindはロボットの汎用オペレーティングシステムを構築しており、ロボットが感知・行動できるだけでなく、分散型協調を通じて、あらゆる環境下で安全かつ大規模に協力できるようにする。
誰がこの道に賭けているか:20Mの資金調達とグローバルな陣容
現在、OpenMindは2000万ドル(シード+シリーズA)の資金調達を完了しており、Pantera Capitalがリード投資家を務め、投資陣容は世界トップクラスのテクノロジーと資本力を網羅している:
-
欧米の技術と資本エコシステム:Ribbit、Coinbase Ventures、DCG、Lightspeed Faction、Anagram、Pi Network Ventures、Topology、Primitive Ventures、Amber Groupなど。彼らは長年暗号とAIインフラに深く関わり、「エージェント経済とマシンインターネット」の基盤パラダイムに賭けている;
-
東洋の産業エネルギー:Sequoia Chinaなどはロボットサプライチェーンと製造システムに深く関わり、「一台の機械を作り、大規模に納品する」ことの全ての難しさとハードルを理解している;
同時に、OpenMindはKraneSharesなどの従来の資本市場参加者とも緊密に交流を保ち、「ロボット+エージェント」の長期的価値を金融構造化商品に組み込む経路を共同で探求し、これにより株式と暗号通貨の双方向貫通を実現している。2025年6月、KraneSharesが世界初の人型・具身知能指数ETF(KOID)を立ち上げた際、OpenMindとRoboStoreが共同でカスタマイズした人型ロボット「Iris」がナスダックの開場ベルを鳴らす役を務め、これは取引所史上初めて人型ロボットがこの儀式を遂行した例となった。
Pantera Capitalのパートナー、Nihal Maunder氏が言うように:
「もし私たちが知能機械をオープンな環境で動作させたいなら、オープンな知能ネットワークが必要だ。OpenMindがロボットのために行っていることは、ソフトウェアにおけるLinux、ブロックチェーンにおけるイーサリアムのようなものだ。」
チームとアドバイザー:研究室から生産ラインへ
OpenMindの創設者Jan Liphardtはスタンフォード大学准教授、元バークレー教授であり、データと分散システムを長年研究し、学界とエンジニアリングの両側面で深く関わっている。彼はオープンソースの再利用、監査可能・追跡可能なメカニズムによるブラックボックスの代替、学際的手法によるAI・ロボット工学・暗号学の統合を推進することを主張している。
OpenMindのコアチームはOKX Ventures、Oxford Robotics Institute、Palantir、Databricks、Perplexityなどの機関から集まっており、ロボット制御、知覚・ナビゲーション、マルチモーダル・LLMスケジューリング、分散システム・オンチェーンプロトコルなどの重要な分野をカバーしている。同時に、学界と産業界の専門家からなるアドバイザーチーム(例:Stanfordロボット責任者Steve Cousins、オックスフォードブロックチェーンセンターBill Roscoe、インペリアルカレッジ安全AI教授Alessio Lomuscioなど)も、ロボットの「安全、コンプライアンス、信頼性」を保証している。
OpenMindの解決策:二層アーキテクチャ、一つの秩序
OpenMindは再利用可能なインフラストラクチャを構築し、ロボットがデバイス・メーカー・国境を越えて協働・情報共有できるようにする:
-
デバイス側:物理ロボット向けのAIネイティブオペレーティングシステムOM1を提供し、知覚から実行までの全プロセスを閉ループ化し、異なる形態の機械が環境を理解しタスクを完了できるようにする;
-
ネットワーク側:分散型協働ネットワークFABRICを構築し、アイデンティティ、タスク割り当て、通信メカニズムを提供し、ロボットが協働時に互いを認識し、タスクを割り当て、状態を共有できるようにする。
この「オペレーティングシステム+ネットワーク層」の組み合わせにより、ロボットは単独で行動できるだけでなく、統一された協働ネットワーク内で互いに連携し、プロセスを調整し、複雑なタスクを一緒に完了できるようになる。
OM1:物理世界向けAIネイティブオペレーティングシステム
スマートフォンがアプリケーションを実行するためにiOSやAndroidを必要とするように、ロボットもAIモデルを実行し、センサーデータを処理し、推論・意思決定を行い、動作を実行するためのオペレーティングシステムを必要とする。
OM1はこのために生まれた。現実世界のロボット向けAIネイティブオペレーティングシステムであり、ロボットが様々な環境下で知覚・理解・計画・タスク完了を可能にする。従来の閉鎖的なロボット制御システムとは異なり、OM1はオープンソースでモジュール化され、ハードウェア非依存(hardware-agnostic)であり、人型、四足、車輪型、機械アームなど様々な形態で動作する。
四つの核心プロセス:知覚から実行まで
OM1はロボット知能を四つの汎用ステップに分解する:知覚(Perception)→記憶(Memory)→計画(Planning)→実行(Action)。このプロセスはOM1によって完全にモジュール化され、統一されたデータ言語によって接続され、構成可能・交換可能・検証可能な知能能力構築を実現する。
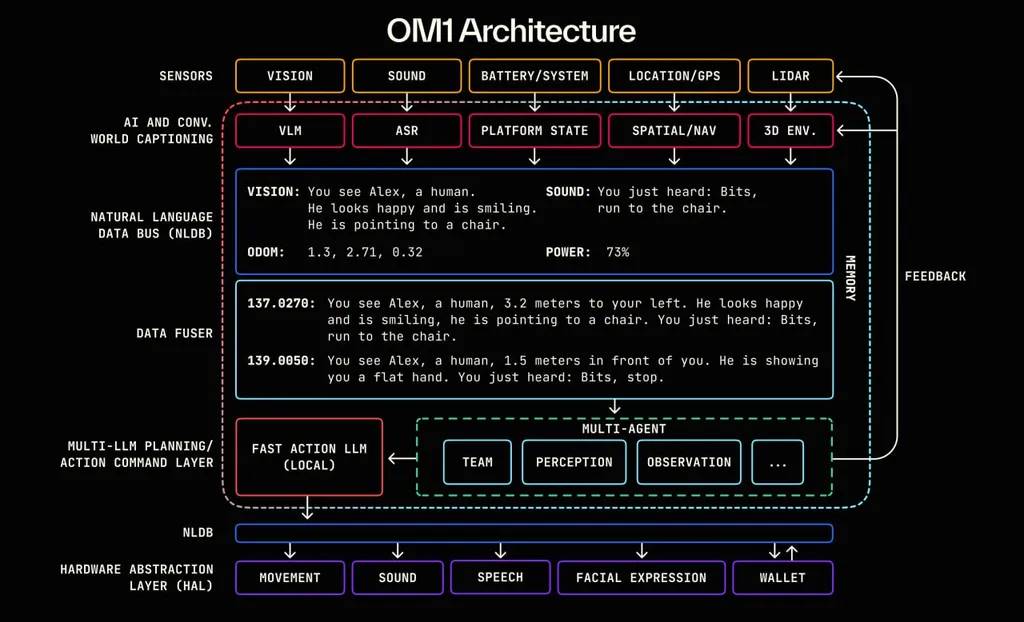
OM1のアーキテクチャ
アーキテクチャの詳細において、OM1の七層リンクは以下の通り:
-
センサー層(Sensor Layer)による情報収集:カメラ、LIDAR、マイク、バッテリー状態、GPSなどのマルチモーダルによる知覚入力。
-
AI+世界記述層(World Captioning Layer)による情報翻訳:マルチモーダルモデルが視覚、音声、状態を自然言語記述に変換(例:「人が手を振っているのが見える」)。
-
自然言語データバス(Natural Language Data Bus)による情報伝達:全ての知覚がタイムスタンプ付きの言語フラグメントに変換され、異なるモジュール間で伝達される。
-
状況融合層(Data Fuser)による情報統合:複数ソースの入力を統合し、意思決定のための完全な文脈(プロンプト)を生成。
-
マルチAI計画/意思決定層(Multi-AI Planning/Decision Layer)による意思決定生成:複数のLLMが文脈を読み取り、オンチェーンルールと組み合わせて行動計画を生成。
-
NLDBダウンリンクチャネル:意思決定結果を言語中間層を通じてハードウェア実行システムに伝達。
-
ハードウェア抽象化層(Hardware Abstraction Layer)による行動実行:言語命令を低レベル制御コマンドに変換し、ハードウェアを駆動(移動、音声再生、取引など)。
迅速な導入、広範な実装
アイデアを迅速にロボット実行タスクに落とし込むため、OM1には以下のツールが組み込まれている:
-
スキルの迅速追加:自然言語と大規模モデルを使用し、数時間でロボットに新しい行動を追加可能。数ヶ月のハードコーディングは不要。
-
マルチモーダル統合:LiDAR、視覚、音声などの知覚を容易に融合。開発者が複雑なセンサー融合ロジックを自ら記述する必要がない。
-
事前設定済み大規模モデルインターフェース:GPT-4o、DeepSeek、VLMなどの言語/視覚モデルを内蔵し、音声インタラクションをサポート。
-
広範なソフト/ハードウェア互換性:ROS2、Cyclone DDSなどの主要プロトコルをサポートし、既存のロボットミドルウェアとシームレスに連携。Unitree G1人型、Go2四足、Turtlebot、機械アームなど、直接接続可能。
-
FABRICとの連携:OM1はネイティブでアイデンティティ、タスク調整、オンチェーン決済をサポートし、ロボットが単体でタスクを完了するだけでなく、グローバル協働ネットワークに参加できるようにする。
現在、OM1は複数の実シーンで実装されている:
-
Frenchie(Unitree Go2四足ロボット犬):USS Hornet国防技術展示2024で複雑なフィールドタスクを完了。
-
Iris(Unitree G1人型ロボット):EthDenver 2025 Coinbaseブースでライブ人間-機械インタラクションデモを実施し、RoboStoreの教育プログラムを通じて全米大学カリキュラムへの導入を計画中。
FABRIC:分散型人間-機械協働ネットワーク
強力な頭脳があっても、ロボット同士が安全・信頼できる形で協働できなければ、依然として各自が孤立して戦うことになる。現実には、異なるメーカーのロボットは独自システムを構築し、スキルやデータを共有できないことが多い;ブランドや国を越えた協働では、信頼できるアイデンティティと標準ルールがさらに欠如している。そこで、いくつかの難題が生じる:
-
アイデンティティと位置証明:ロボットは自分が誰で、どこにいて、何をしているかをどう証明するか?
-
スキルとデータ共有:ロボットにデータ共有やスキル呼び出しをどう許可するか?
-
制御権の定義:スキル使用の頻度、範囲、データ返送条件をどう設定するか?
FABRICはこれらの問題を解決するために設計された。OpenMindが構築する分散型人間-機械協働ネットワークであり、ロボットと知能システムにアイデンティティ、タスク、通信、決済の統一インフラストラクチャを提供する。以下のように理解できる:
-
GPSのように、ロボットが互いの位置、接近状況、協働適性を知る;
-
VPNのように、ロボット同士が安全に直接接続し、パブリックIPや複雑なネットワーク設定を必要としない;
-
タスクスケジューリングシステムのように、タスクを自動的に公開、受信し、実行プロセス全体を記録する。
核心アプリケーションシーン
FABRICは既に様々な実用シーンに適応可能であり、以下を含むがこれに限らない:
-
遠隔操作と監視:どこからでも専用ネットワークなしでロボットを安全に制御。
-
Robot-as-a-Service市場:タクシーのようにロボットを呼び出し、清掃、巡回検査、配送などの作業を完了。
-
クラウドソーシング地図とデータ収集:車隊やロボットがリアルタイムで道路状況、障害物、環境変化をアップロードし、共有可能な高精度地図を生成。
-
オンデマンドスキャン/測量:近くのロボットを一時的に呼び出し、3Dモデリング、建築測量、保険シーンでの証拠収集を完了。
FABRICにより、「誰が何を、どこで、完了したか」が検証・追跡可能となり、スキル呼び出しとタスク実行に明確な境界が設けられる。
長期的には、FABRICは機械知能のApp Storeとなる:スキルはグローバルに許可・呼び出し可能となり、呼び出しによって生成されたデータはモデルにフィードバックされ、協働ネットワークの継続的進化を推進する。
Web3が「オープン」を機械社会に刻み込む
現実には、ロボット業界は加速的に集中化しており、少数のプラットフォームがハードウェア、アルゴリズム、ネットワークを掌握し、外部のイノベーションは門前払いされている。分散型の意義は、ロボットが誰によって製造され、どの国で動作していようとも、オープンネットワーク内で協力し、スキルを交換し、報酬を決済でき、単一プラットフォームに依存する必要がないことにある。
OpenMindはオンチェーンインフラストラクチャを使用し、協働ルール、スキルアクセス権限、報酬分配方法を公開・検証可能・改善可能な「ネットワーク秩序」として記述する:
-
検証可能なアイデンティティ:各ロボットと各オペレーターはオンチェーンにユニークなアイデンティティ(ERC-7777標準)を登録し、ハードウェア特性、責任範囲、権限レベルが透明で確認可能。
-
公開タスク割り当て:タスクは閉鎖的なブラックボックスで割り当てられるのではなく、公共ルールの下で公開、入札、マッチングされる;全ての協働プロセスは時間と位置付きの暗号証明を生成し、オンチェーンに記録される。
-
自動決済と利益分配:タスク完了後、利益分配、保険、デポジットのリリースまたは控除が自動的に実行され、どの参加者も結果をリアルタイムで検証可能。
-
スキルの自由流通:新しいスキルはオンチェーンコントラクトを通じて呼び出し回数、適用デバイスなどを設定でき、知的財産権を保護すると同時に、スキルをグローバルに自由流通させる。
これは全ての参加者が使用、監視、改善できる協働秩序である。Web3ユーザーにとって、これはロボット経済が誕生時から独占防止、構成可能、検証可能な遺伝子を持つことを意味する――これは単なる一つの分野の機会ではなく、「オープン」を機械社会の基層に刻み込む機会である。
具身知能を孤島から解放する
病院で病室を巡回するにせよ、学校で新しいスキルを学ぶにせよ、都市街区で巡回検査とモデリングを完了するにせよ、ロボットは徐々に「展示デモ」から脱却し、人間の日常的分業の安定した構成要素となっている。それらは24時間稼働し、ルールを遵守し、記憶とスキルを持ち、人間や他の機械と自然に協働できる。
これらのシーンを真に大規模に実装するためには、背後により賢い機械だけでなく、それらが互いに信頼し、相互接続し、協働できる基礎秩序が必要だ。OpenMindは既にOM1とFABRICでこの道に最初の「路盤」を敷設した:前者はロボットに世界を真に理解させ自律行動させ、後者はこれらの能力をグローバルネットワークで流通させる。次は、この道をより多くの都市とネットワークに延伸し、機械を社会ネットワーク内で信頼できる長期的パートナーとすることだ。
OpenMindのロードマップは明確だ:
短期:OM1核心機能プロトタイプとFABRIC MVPを完成させ、オンチェーンアイデンティティと基礎協働能力をリリース;
中期:教育、家庭、企業でOM1とFABRICを実装し、早期ノードを接続、開発者コミュニティを集結;
長期:OM1とFABRICをグローバル標準に育て上げ、あらゆる機械がインターネットに接続するようにこのオープンな機械協働ネットワークに接続可能とし、持続可能なグローバル機械経済を形成。
Web2時代には、ロボットは単一メーカーの閉鎖システムに閉じ込められ、機能とデータはプラットフォームを越えて流動できなかった;OpenMindが構築する世界では、それらはオープンネットワークの平等なノードである:自由に参加、学習、協働、決済でき、人間と共に信頼できる相互接続されたグローバル機械社会を構成する。OpenMindが提供するのは、まさにこの変革をスケール化可能にする強力な能力である。
TechFlow公式コミュニティへようこそ
Telegram購読グループ:https://t.me/TechFlowDaily
Twitter公式アカウント:https://x.com/TechFlowPost
Twitter英語アカウント:https://x.com/BlockFlow_News