Veille d'un marché de 5 000 milliards : où se situent les opportunités d'investissement entre intelligence incarnée et Web3 ?
TechFlow SélectionTechFlow Sélection
Veille d'un marché de 5 000 milliards : où se situent les opportunités d'investissement entre intelligence incarnée et Web3 ?
Intelligence incarnée x Web3, des solutions structurelles au service d'opportunités d'investissement.
Auteur : merakiki
Traduction : TechFlow
Pendant des décennies, les applications de la robotique ont été très limitées, principalement axées sur l'exécution de tâches répétitives dans des environnements industriels structurés. Aujourd'hui, l'intelligence artificielle (IA) transforme radicalement ce domaine, permettant aux robots de comprendre et d'exécuter des instructions utilisateur tout en s'adaptant à des environnements dynamiques.
Nous entrons dans une nouvelle ère de croissance rapide. Selon Citigroup, 1,3 milliard de robots seront déployés d'ici 2035, étendant leur utilisation des usines aux foyers et aux services. Par ailleurs, Morgan Stanley estime que le marché des robots humanoïdes pourrait atteindre 5 000 milliards de dollars d'ici 2050.
Bien que cette expansion libère un énorme potentiel de marché, elle soulève aussi des défis majeurs en matière de centralisation, confiance, confidentialité et évolutivité. Les technologies Web3 offrent des solutions transformatrices grâce à des réseaux robotiques décentralisés, vérifiables, respectueux de la vie privée et collaboratifs.
Dans cet article, nous explorerons en profondeur l'évolution de la chaîne de valeur de l'IA robotique, en nous concentrant particulièrement sur les robots humanoïdes, et révélerons les opportunités passionnantes issues de la convergence entre IA robotique et Web3.
La chaîne de valeur de l’IA robotique
La chaîne de valeur de l’IA robotique se compose de quatre couches fondamentales : matériel, intelligence, données et agents. Chaque couche s'appuie sur les précédentes, permettant aux robots de percevoir, raisonner et agir dans des environnements réels complexes.
Récemment, la couche matérielle a connu des progrès significatifs sous l'impulsion de pionniers comme Unitree et Figure AI. Toutefois, de nombreux défis clés persistent au-delà du matériel, notamment le manque de jeux de données de haute qualité, l'absence de modèles fondamentaux universels, une faible interopérabilité entre appareils et le besoin de calcul en périphérie fiable. Ainsi, les plus grandes opportunités de croissance actuelles résident dans les couches d’intelligence, de données et d’agents.
1.1 Couche matérielle : « le corps »
Aujourd'hui, la fabrication et le déploiement de « corps robotiques » modernes sont plus accessibles que jamais. Plus de 100 types différents de robots humanoïdes existent déjà sur le marché, notamment Optimus de Tesla, G1 de Unitree, Digit d’Agility Robotics et Figure 02 de Figure AI.
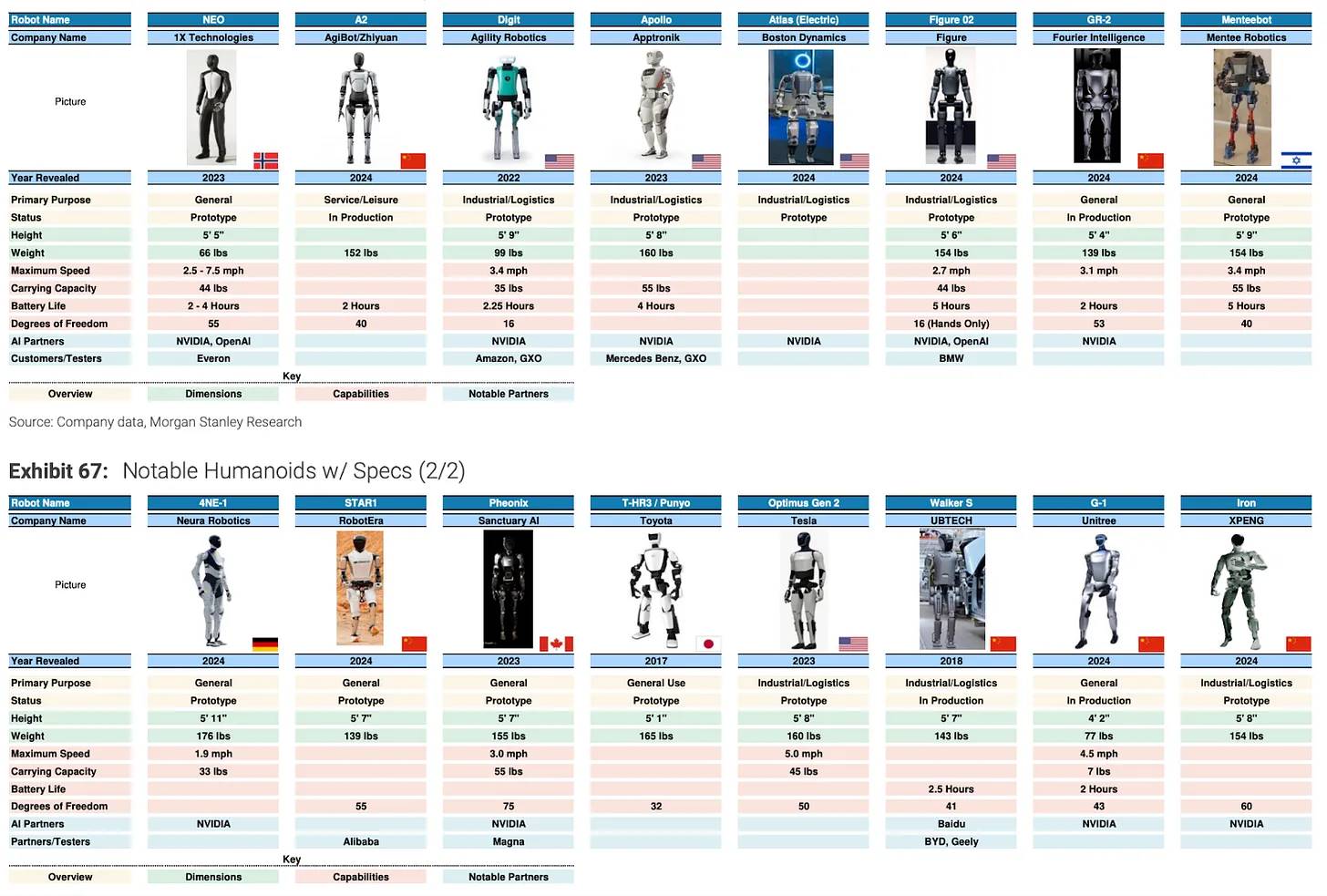
Source : Morgan Stanley, « The Humanoid 100 : Cartographie de la chaîne de valeur des robots humanoïdes »
Ces avancées reposent sur trois composants technologiques clés :
-
Actionneurs (Actuators) : Agissant comme les « muscles » du robot, les actionneurs convertissent les instructions numériques en mouvements précis. L'innovation dans les moteurs haute performance permet des mouvements rapides et précis, tandis que les actionneurs électrostrictifs diélectriques (DEAs) conviennent aux tâches fines. Ces technologies améliorent considérablement la flexibilité du robot, comme le montrent Optimus Gen 2 de Tesla avec 22 degrés de liberté (DoF) ou G1 de Unitree, qui affichent une agilité proche de celle de l’humain.
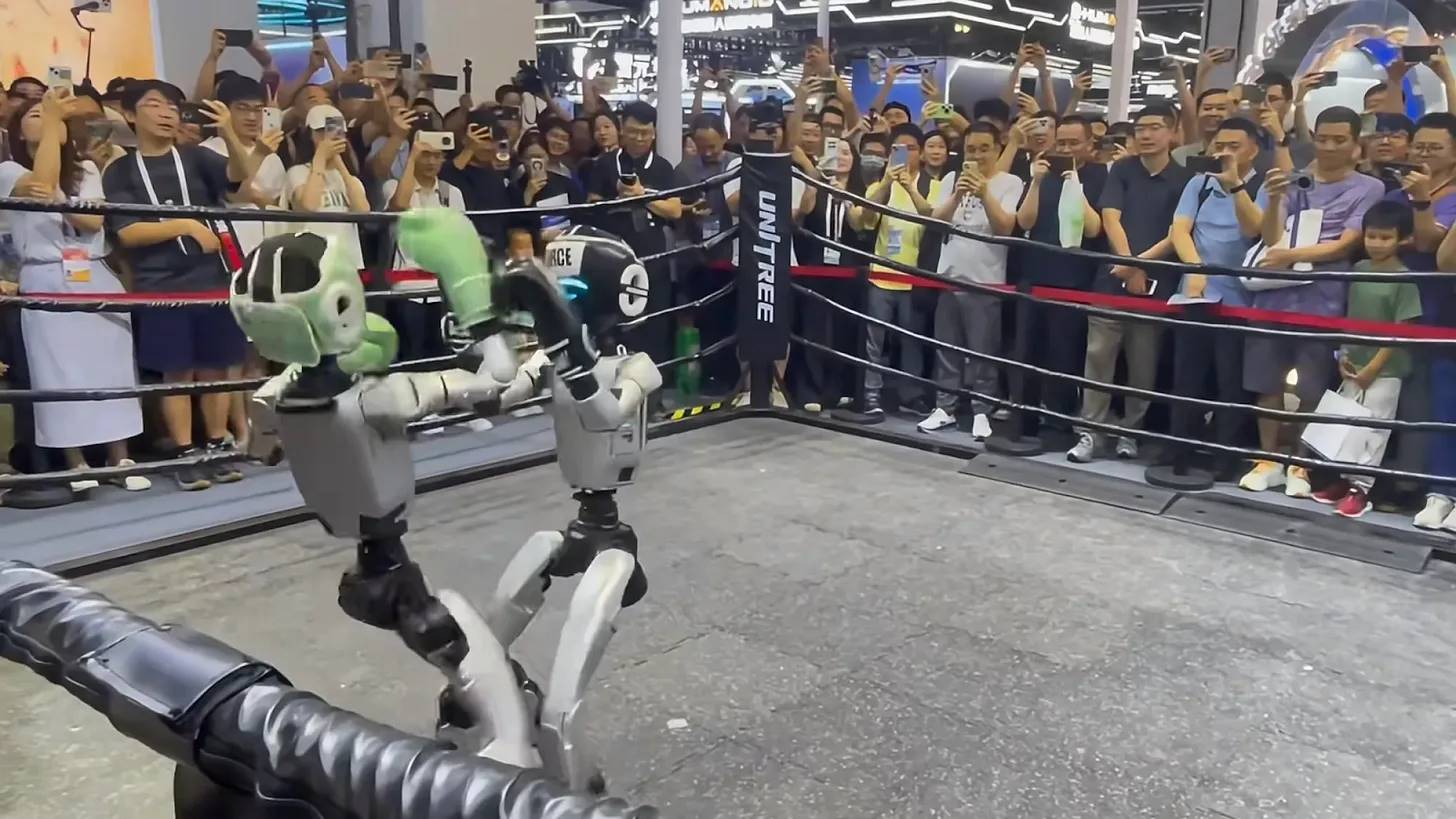
Source : Unitree présentant son dernier robot humanoïde en combat de boxe lors du WAIC 2025, Salon mondial de l’intelligence artificielle
-
Senseurs (Sensors) : Les capteurs avancés permettent aux robots de percevoir et interpréter leur environnement via la vision, le LIDAR/RADAR, le tactile et l’audio. Ces technologies soutiennent la navigation sécurisée, la manipulation précise et la prise de conscience contextuelle.
-
Calcul embarqué (Embedded Computing) : Les CPU, GPU et accélérateurs IA (comme TPU et NPU) intégrés traitent en temps réel les données des capteurs et exécutent les modèles IA, assurant une prise de décision autonome. Une connexion fiable à faible latence garantit une coordination fluide, tandis qu’une architecture hybride périphérie-nuage permet de décharger les tâches de calcul intensif selon les besoins.
1.2 Couche d’intelligence : « le cerveau »
Avec la maturité croissante du matériel, l’attention se tourne vers la construction du « cerveau robotique » : des modèles fondamentaux puissants et des stratégies de contrôle avancées.
Avant l’intégration de l’IA, les robots dépendaient de l’automatisation basée sur des règles, exécutant des actions préprogrammées sans intelligence adaptative.
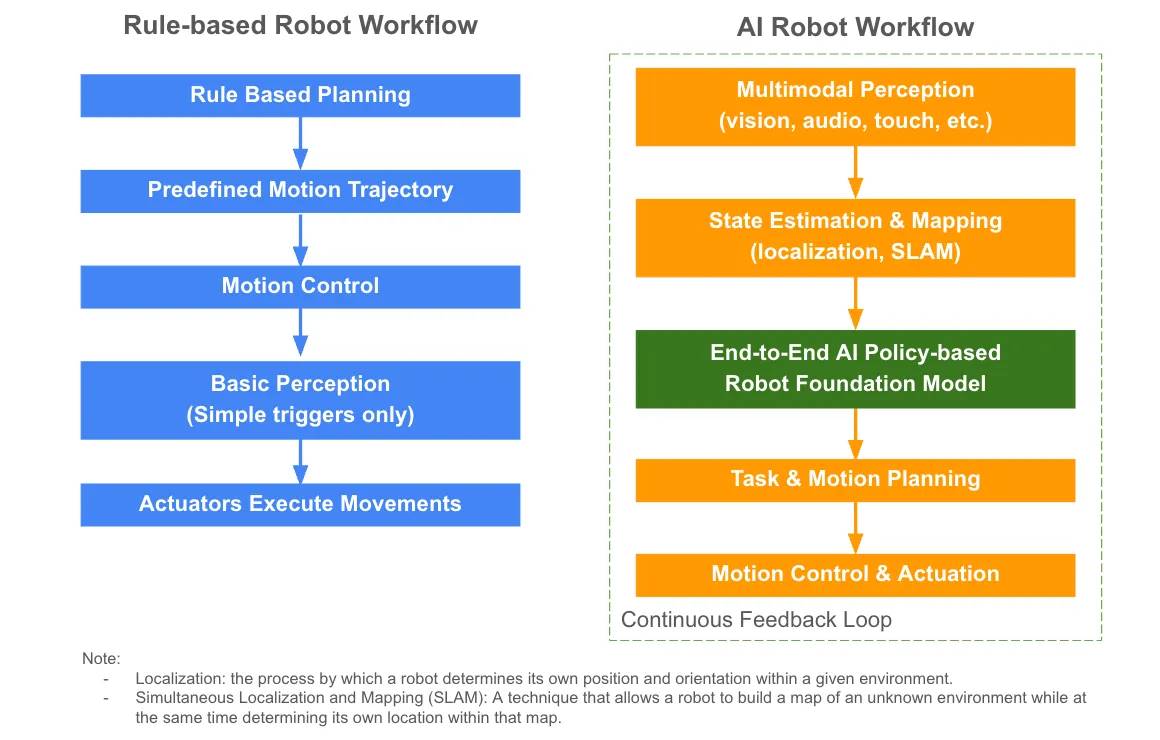
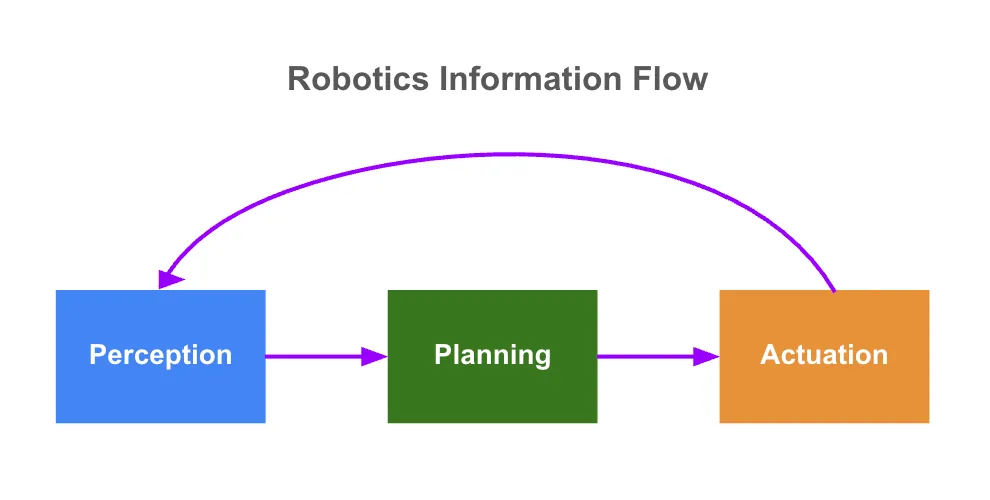
Les modèles fondamentaux s’appliquent progressivement à la robotique. Cependant, les grands modèles linguistiques (LLMs) généraux ne suffisent pas seuls, car les robots doivent percevoir, raisonner et agir dans des environnements physiques dynamiques. Pour répondre à ces besoins, l’industrie développe des modèles fondamentaux robotiques bout-en-bout basés sur des politiques. Ces modèles permettent aux robots de :
-
Percevoir (Perceive) : Recevoir des données multimodales provenant des capteurs (visuelles, audio, tactiles)
-
Planifier (Plan) : Estimer leur état, cartographier l’environnement et interpréter des instructions complexes, en reliant directement la perception à l’action pour réduire l’intervention humaine
-
Agir (Act) : Générer des plans de mouvement et produire des commandes de contrôle pour une exécution en temps réel
Ces modèles apprennent des stratégies générales d’interaction avec le monde, permettant aux robots de s’adapter à diverses tâches avec davantage d’intelligence et d’autonomie. Les modèles avancés utilisent également un retour continu, permettant aux robots d’apprendre de leur expérience et d’améliorer encore leur adaptation dans des environnements dynamiques.
Les modèles VLA traduisent directement les entrées sensorielles (principalement visuelles et linguistiques naturelles) en actions robotiques, permettant aux robots d’émettre des commandes appropriées selon ce qu’ils « voient » et « entendent ». Des exemples notables incluent RT-2 de Google, Isaac GR00T N1 de NVIDIA et π0 de Physical Intelligence.
Pour renforcer ces modèles, plusieurs approches complémentaires sont souvent combinées :
-
Modèles du monde (World Models) : Construisent une simulation interne de l’environnement physique, aidant les robots à apprendre des comportements complexes, prédire des résultats et planifier des actions. Par exemple, Genie 3 de Google est un modèle universel capable de générer des environnements interactifs extrêmement variés.
-
Apprentissage par renforcement profond (Deep Reinforcement Learning) : Permet aux robots d’apprendre par essais et erreurs.
-
Téléopération (Teleoperation) : Autorise le contrôle à distance et fournit des données d’entraînement.
-
Apprentissage par démonstration (LfD)/Apprentissage par imitation (Imitation Learning) : Enseigne aux robots de nouvelles compétences par imitation des gestes humains.
Le schéma ci-dessous illustre comment ces méthodes s’intègrent aux modèles fondamentaux robotiques.
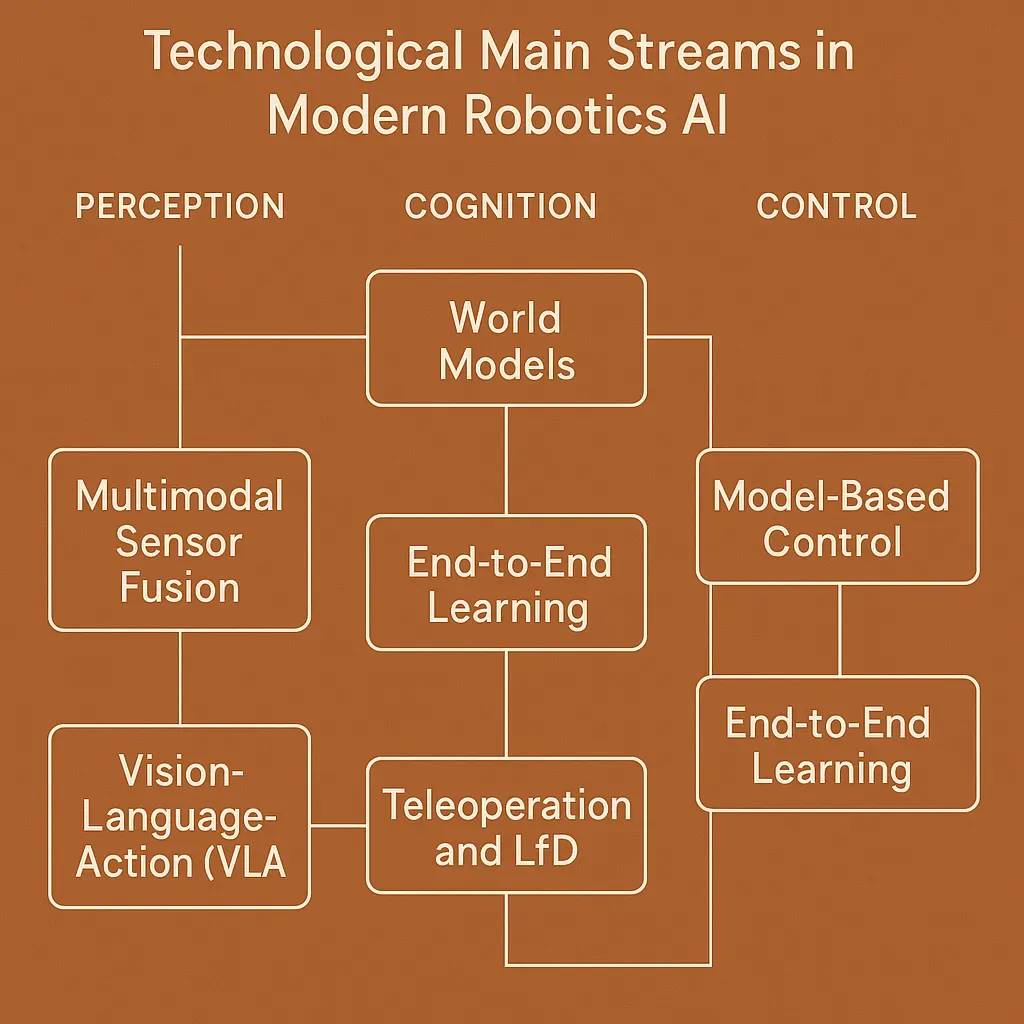
Source : « World models : the physical intelligence core driving us toward AGI »
Des percées open source récentes comme π0 de Physical Intelligence et Isaac GR00T N1 de NVIDIA marquent des progrès importants. Pourtant, la plupart des modèles fondamentaux robotiques restent centralisés et fermés. Des entreprises comme Covariant ou Tesla conservent leurs codes et jeux de données propriétaires, principalement en raison du manque de mécanismes incitatifs ouverts.
Ce manque de transparence limite la collaboration et l’interopérabilité entre plateformes robotiques, mettant en évidence le besoin de partage sécurisé et transparent des modèles, de normes blockchain communautaires et de couches d’interopérabilité entre appareils. Une telle approche favoriserait la confiance, la coopération et un développement plus robuste du secteur.
1.3 Couche des données : « la connaissance » du cerveau
De solides jeux de données robotiques reposent sur trois piliers : volume, qualité et diversité.
Bien que l’industrie ait fait des efforts pour accumuler des données, l’échelle actuelle reste insuffisante. Par exemple, GPT-3 d’OpenAI a été entraîné sur 300 milliards de tokens, alors que le plus grand jeu de données robotique open source, Open X-Embodiment, contient seulement plus d’un million de trajectoires réelles, couvrant 22 types de robots. Cette différence est énorme comparée à ce qui est nécessaire pour obtenir une forte capacité de généralisation.
Certaines approches propriétaires, comme la collecte de données par Tesla via des « usines de données », où des opérateurs portent des combinaisons de capture de mouvement, permettent effectivement de recueillir davantage de données motrices réelles. Toutefois, ces méthodes sont coûteuses, limitées en diversité des données et difficiles à étendre.
Pour relever ces défis, la robotique exploite trois sources principales de données :
-
Données internet : Très abondantes et évolutives, mais majoritairement observationnelles, elles manquent de signaux sensoriels et moteurs. L’entraînement préalable de grands modèles visuo-langagiers (comme GPT-4V ou Gemini) sur ces données fournit des informations sémantiques et visuelles utiles. De plus, l’ajout d’étiquettes cinématiques aux vidéos peut transformer des séquences brutes en données d’entraînement exploitables.
-
Données synthétiques : Générées par simulation, elles permettent des expérimentations à grande échelle et couvrent des scénarios variés, mais ne reflètent pas parfaitement la complexité du monde réel – un problème appelé « écart simulation-réalité » (sim-to-real gap). Les chercheurs y remédient par l’adaptation de domaine (augmentation, randomisation, apprentissage adversaire) et le transfert simulation-réalité, optimisant itérativement les modèles puis les testant et ajustant dans le monde réel.
-
Données du monde réel : Bien que rares et coûteuses, elles sont cruciales pour déployer les modèles et combler l’écart entre simulation et réalité. Les données réelles de haute qualité incluent souvent des vues égocentriques (première personne), montrant ce que le robot « voit », ainsi que des données de mouvement précis. Ces dernières sont souvent collectées par démonstration humaine ou téléopération, utilisant la réalité virtuelle (VR), des dispositifs de capture de mouvement ou l’enseignement tactile, garantissant que les modèles apprennent à partir d’exemples réels précis.
Des études montrent que combiner données internet, données réelles et données synthétiques améliore nettement l’efficacité de l’entraînement et la robustesse des modèles, comparé à l’utilisation d’une seule source.
Par ailleurs, bien que l’augmentation du volume aide, la diversité des données est encore plus importante, surtout pour généraliser à de nouvelles tâches et morphologies robotiques. Pour atteindre cette diversité, il faut des plateformes ouvertes et un partage collaboratif des données, notamment la création de jeux de données transverses compatibles avec plusieurs morphologies, afin de stimuler le développement de modèles fondamentaux plus puissants.
1.4 Couche agent : « agents physiques d’IA »
La tendance vers les agents physiques d’IA s’accélère : des robots autonomes capables d’agir indépendamment dans le monde réel. Les progrès de cette couche dépendent du réglage fin des modèles, de l’apprentissage continu et de l’adaptation concrète à chaque morphologie unique.
Voici quelques opportunités émergentes qui accélèrent le développement des agents physiques d’IA :
-
Apprentissage continu et infrastructure adaptative : Grâce à des boucles de retour en temps réel et au partage d’expériences pendant le déploiement, les robots peuvent s’améliorer continuellement.
-
Économie d’agents autonomes : Les robots fonctionnent comme des entités économiques indépendantes – échangeant des ressources (puissance de calcul, données de capteurs) sur des marchés inter-robots et générant des revenus via des services tokenisés.
-
Systèmes multi-agents : Les plateformes et algorithmes de nouvelle génération permettent aux groupes de robots de coordonner, collaborer et optimiser leur comportement collectif.
Convergence de l’IA robotique et du Web3 : libérer un potentiel de marché énorme
A mesure que les robots IA passent de la recherche au déploiement réel, plusieurs obstacles persistants freinent l’innovation et limitent l’évolutivité, la robustesse et la viabilité économique de l’écosystème robotique. Ces obstacles incluent des silos centralisés de données et de modèles, l’absence de confiance et de traçabilité, des contraintes de confidentialité et de conformité, et un manque d’interopérabilité.
2.1 Problèmes critiques de l’IA robotique
-
Silos centralisés de données et de modèles
Les modèles robotiques nécessitent de vastes jeux de données variés. Or, aujourd’hui, le développement de données et de modèles est fortement centralisé, fragmenté et coûteux, menant à des systèmes cloisonnés et peu adaptables. Les robots déployés dans des environnements réels dynamiques souffrent souvent d’un manque de diversité des données et d’une robustesse limitée des modèles.
-
Confiance, traçabilité et fiabilité
L’absence d’un registre transparent et auditables (incluant origine des données, processus d’entraînement des modèles, historique des opérations) mine la confiance et la responsabilité. C’est un obstacle majeur à l’adoption par les utilisateurs, régulateurs et entreprises.
-
Confidentialité, sécurité et conformité
Dans des applications sensibles comme la robotique médicale ou domestique, la protection de la vie privée est cruciale, et la conformité à des réglementations strictes (comme le RGPD européen) est obligatoire. Les infrastructures centralisées peinent à supporter une collaboration IA sécurisée et respectueuse de la vie privée, limitant le partage de données et freinant l’innovation dans les domaines réglementés ou sensibles.
-
Évolutivité et interopérabilité
Les systèmes robotiques rencontrent d’importants défis dans le partage de ressources, l’apprentissage collaboratif et l’intégration entre différentes plateformes et morphologies. Ces limitations fragmentent les effets de réseau et empêchent un transfert rapide des capacités entre différents types de robots.
2.2 IA robotique x Web3 : des solutions structurelles créatrices d’opportunités investissables
Le Web3 résout fondamentalement ces problèmes grâce à des réseaux robotiques décentralisés, vérifiables, respectueux de la vie privée et collaboratifs. Cette convergence ouvre de nouveaux marchés attractifs :
-
Développement collaboratif décentralisé : Des réseaux incitatifs permettent aux robots de partager des données, développer conjointement des modèles et agents intelligents.
-
Traçabilité et responsabilité vérifiables : La blockchain garantit des enregistrements immuables sur l’origine des données et modèles, l’identité des robots et leur historique d’opérations – essentiel pour la confiance et la conformité.
-
Collaboration confidentielle : Des solutions cryptographiques avancées permettent aux robots d’entraîner des modèles ensemble et d’échanger des insights sans exposer leurs données propriétaires ou sensibles.
-
Gouvernance communautaire : Les organisations autonomes décentralisées (DAOs) dirigent et supervisent les opérations robotiques via des règles transparentes et inclusives sur la blockchain.
-
Interopérabilité transversale : Des cadres ouverts basés sur blockchain favorisent la collaboration fluide entre plateformes robotiques, réduisant les coûts de développement et accélérant le transfert de capacités.
-
Économie d’agents autonomes : L’infrastructure Web3 donne aux robots une identité économique autonome, leur permettant de réaliser des transactions pair-à-pair, négocier et participer à des marchés tokenisés sans intervention humaine.
-
Réseaux décentralisés d’infrastructure physique (DePIN) : Le partage peer-to-peer de calcul, de capteurs, de stockage et de connectivité, basé sur blockchain, améliore l’évolutivité et la résilience des réseaux robotiques.
Voici quelques projets innovants qui façonnent ce domaine, illustrant le potentiel et les tendances de la convergence IA robotique et Web3. Ceci est donné à titre indicatif et ne constitue aucunement un conseil d’investissement.
Développement décentralisé de données et de modèles
Les plateformes pilotées par le Web3 démocratisent le développement de données et de modèles en incitant les contributeurs (capture de mouvement, partage de capteurs, téléchargement visuel, annotation, génération de données synthétiques). Cette approche crée des jeux de données et modèles plus riches, diversifiés et représentatifs que ce qu’une seule entreprise pourrait réaliser. Les cadres décentralisés améliorent aussi la couverture des cas limites, essentielle pour les robots opérant dans des environnements imprévisibles.
Exemples :
-
Frodobots : Un protocole qui externalise la création de jeux de données du monde réel via des jeux robotiques. Leur projet « Earth Rovers » – un robot trottoir et un jeu mondial « Drive to Earn » – a produit le jeu de données FrodoBots 2K, incluant images caméra, données GPS, enregistrements audio et données de conduite humaine, couvrant plus de 10 villes et environ 2000 heures de conduite télécommandée.
-
BitRobot : Une plateforme incitative cryptographique développée par FrodoBots Lab et Protocol Labs, basée sur Solana et une architecture de sous-réseaux. Chaque sous-réseau représente un défi public ; les contributeurs reçoivent des jetons en échange de modèles ou données soumis, stimulant la collaboration mondiale et l’innovation open source.
-
Reborn Network : La couche fondamentale d’un écosystème ouvert pour les robots AGI, proposant Rebocap, une combinaison de capture de mouvement permettant à chacun d’enregistrer ses mouvements et d’en tirer profit, contribuant à l’ouverture de jeux de données complexes pour robots humanoïdes.
-
PrismaX : Exploite une communauté mondiale de contributeurs via une infrastructure décentralisée assurant diversité et authenticité des données, avec des mécanismes solides de validation et d’incitation, propulsant la mise à l’échelle des jeux de données robotiques.
Preuve de traçabilité et de fiabilité
La blockchain apporte transparence et responsabilité de bout en bout à l’écosystème robotique. Elle assure la traçabilité vérifiable des données et modèles, authentifie l’identité et la localisation physique des robots, et maintient un historique clair des opérations et contributions. De plus, la validation collaborative, les systèmes de réputation sur blockchain et les mécanismes de validation basés sur les participations garantissent la qualité des données et modèles, évitant que des entrées frauduleuses ou de mauvaise qualité ne corrompent l’écosystème.
Exemples :
-
OpenLedger : Une infrastructure blockchain IA qui forme et déploie des modèles spécialisés à partir de jeux de données appartenant à la communauté. Son mécanisme de « Proof of Attribution » (preuve d’attribution) récompense équitablement les contributeurs de haute qualité.
Propriété, licences et monétisation tokenisées
Les outils Web3 natifs de propriété intellectuelle permettent la licence tokenisée de jeux de données spécialisés, capacités robotiques, modèles et agents intelligents. Les contributeurs peuvent intégrer directement les termes de licence dans leurs actifs via des contrats intelligents, garantissant des paiements automatiques de redevances lors de la réutilisation ou monétisation. Cette méthode favorise un accès transparent et sans permission, créant un marché ouvert et équitable pour les données et modèles robotiques.
Exemples :
-
Poseidon : Une couche de données entièrement décentralisée construite sur le protocole Story centré sur la propriété intellectuelle, fournissant des données d’entraînement IA légalement autorisées.
Solutions de protection de la vie privée
Les données à haute valeur générées dans des lieux sensibles (hôpitaux, chambres d’hôtel, foyers), bien que difficiles à obtenir publiquement, contiennent un contexte riche pouvant fortement améliorer les modèles fondamentaux. Transformer ces données privées en actifs traçables, composites et monnayables via des solutions cryptographiques, tout en protégeant la vie privée, devient possible. Des technologies comme les environnements d’exécution fiables (TEEs) et les preuves sans connaissance (ZKPs) permettent des calculs sécurisés et la vérification des résultats sans exposer les données brutes. Ces outils permettent aux organisations d’entraîner des modèles IA sur des données sensibles distribuées tout en préservant confidentialité et conformité.
Exemples :
-
Phala Network : Permet aux développeurs de déployer des applications dans des TEE sécurisés pour le traitement confidentiel de données et d’IA.
Gouvernance ouverte et vérifiable
L’entraînement des robots repose souvent sur des systèmes propriétaires en « boîte noire » manquant de transparence et d’adaptabilité. Une gouvernance transparente et vérifiable est cruciale pour réduire les risques et renforcer la confiance des utilisateurs, régulateurs et entreprises. Le Web3 permet un développement collaboratif d’intelligences robotiques open source via une supervision communautaire sur blockchain.
Exemples :
-
Openmind : Une pile logicielle native IA ouverte aidant les robots à penser, apprendre et collaborer. Ils proposent la norme ERC7777, visant à créer un écosystème robotique vérifiable axé sur la sécurité, la transparence et l’évolutivité. Cette norme définit des interfaces standardisées pour gérer les identités humaines et robotiques, appliquer des ensembles de règles sociales, et enregistrer ou supprimer des participants, clarifiant leurs droits et responsabilités.
Dernières réflexions
Avec la convergence de l’IA robotique et des technologies Web3, nous entrons dans une nouvelle ère où des systèmes autonomes peuvent collaborer et s’adapter à grande échelle. Les 3 à 5 prochaines années seront cruciales : la progression rapide du matériel stimulera la création de modèles IA plus puissants, alimentés par des jeux de données réels plus riches et des mécanismes de collaboration décentralisés. Nous prévoyons que des agents IA spécialisés émergeront dans des secteurs comme l’hôtellerie et la logistique, créant d’immenses opportunités de nouveaux marchés.
Toutefois, cette convergence entre IA robotique et cryptotechnologie pose aussi des défis. Concevoir des mécanismes incitatifs équilibrés et efficaces reste complexe et en constante évolution ; les systèmes doivent récompenser équitablement les contributeurs tout en évitant les abus. La complexité technique est également un obstacle majeur, nécessitant des solutions robustes et évolutives pour intégrer sans heurts divers types de robots. De plus, les technologies de protection de la vie privée doivent être suffisamment fiables pour gagner la confiance des parties prenantes, surtout avec des données sensibles. L’environnement réglementaire en mutation rapide exige aussi une vigilance constante pour assurer la conformité dans chaque juridiction. Surmonter ces risques et générer des rendements durables est essentiel pour faire progresser la technologie et son adoption à grande échelle.
Suivons ensemble l’évolution de ce domaine, avançons par la collaboration et saisissons les opportunités qui émergent dans ce marché en pleine expansion.
L’innovation en robotique est un voyage que l’on fait mieux ensemble :)
Enfin, je tiens à remercier « Robotics & The Age of Physical AI » de Chain of Thought pour le soutien précieux apporté à mes recherches.
Bienvenue dans la communauté officielle TechFlow
Groupe Telegram :https://t.me/TechFlowDaily
Compte Twitter officiel :https://x.com/TechFlowPost
Compte Twitter anglais :https://x.com/BlockFlow_News