5조 위안 시장 직전: 구현 지능 × Web3의 투자 기회는 어디에 있는가?
작자: merakiki
편역: TechFlow
수십 년 동안 로봇 기술은 반복적인 작업을 수행하는 구조화된 공장 환경에 국한되어 매우 좁은 범위에서 사용되어 왔다. 그러나 오늘날의 인공지능(AI)은 로봇 분야를 근본적으로 변화시키고 있으며, 로봇이 사용자 지시를 이해하고 실행할 수 있게 하고, 동시에 동적으로 변화하는 환경에 적응할 수 있도록 한다.
우리는 빠르게 성장하는 새로운 시대로 접어들고 있다. 시티그룹(Citigroup)의 예측에 따르면, 2035년까지 전 세계에 13억 대의 로봇이 배치될 것이며, 그 적용 범위는 공장에서 가정과 서비스 산업으로 확장될 것이다. 또한 모건스탠리(Morgan Stanley)는 인간형 로봇 시장만 해도 2050년까지 약 5조 달러 규모에 이를 것으로 전망하고 있다.
이러한 확장은 거대한 시장 잠재력을 발휘하지만, 동시에 중심화, 신뢰, 프라이버시 및 확장성 측면에서 중대한 과제들을 동반한다. Web3 기술은 탈중앙화되고 검증 가능하며 프라이버시를 보호하고 협력 가능한 로봇 네트워크를 지원함으로써 이러한 문제들을 해결하기 위한 변혁적 솔루션을 제공한다.
본 기사에서는 진화하는 AI 로봇 가치 사슬을 심층적으로 살펴보고, 특히 인간형 로봇 분야에 집중하여, AI 로봇과 Web3 기술의 융합이 가져오는 매력적인 기회를 밝혀내고자 한다.
AI 로봇 가치 사슬
AI 로봇 가치 사슬은 네 가지 기본 계층으로 구성된다: 하드웨어, 지능, 데이터, 에이전트. 각 계층은 다른 계층 위에 구축되며, 로봇이 복잡한 현실 환경에서 감지하고, 추론하고, 행동할 수 있도록 한다.
최근에는 Unitree와 Figure AI와 같은 업계 선도 기업들의 주도로 하드웨어 계층에서 상당한 진전이 있었다. 그러나 비하드웨어 계층에서는 여전히 많은 핵심 과제들이 존재하는데, 특히 고품질 데이터셋의 부족, 범용 기초 모델의 결여, 장치 간 호환성의 저조함, 그리고 신뢰할 수 있는 엣지 컴퓨팅에 대한 요구가 그것이다. 따라서 현재 가장 큰 기회는 지능 계층, 데이터 계층, 에이전트 계층에 있다.
1.1 하드웨어 계층: "신체"
오늘날 현대적인 "로봇 신체"를 제조하고 배포하는 것은 과거 어느 때보다도 쉬워졌다. 현재 시장에는 이미 100종 이상의 다양한 인간형 로봇이 존재하며, 테슬라의 옵티머스(Optimus), 유니트리(Unitree)의 G1, 애질리티 로보틱스(Agility Robotics)의 디지트(Digit), 피규어(Figure) AI의 피규어 02 등이 포함된다.
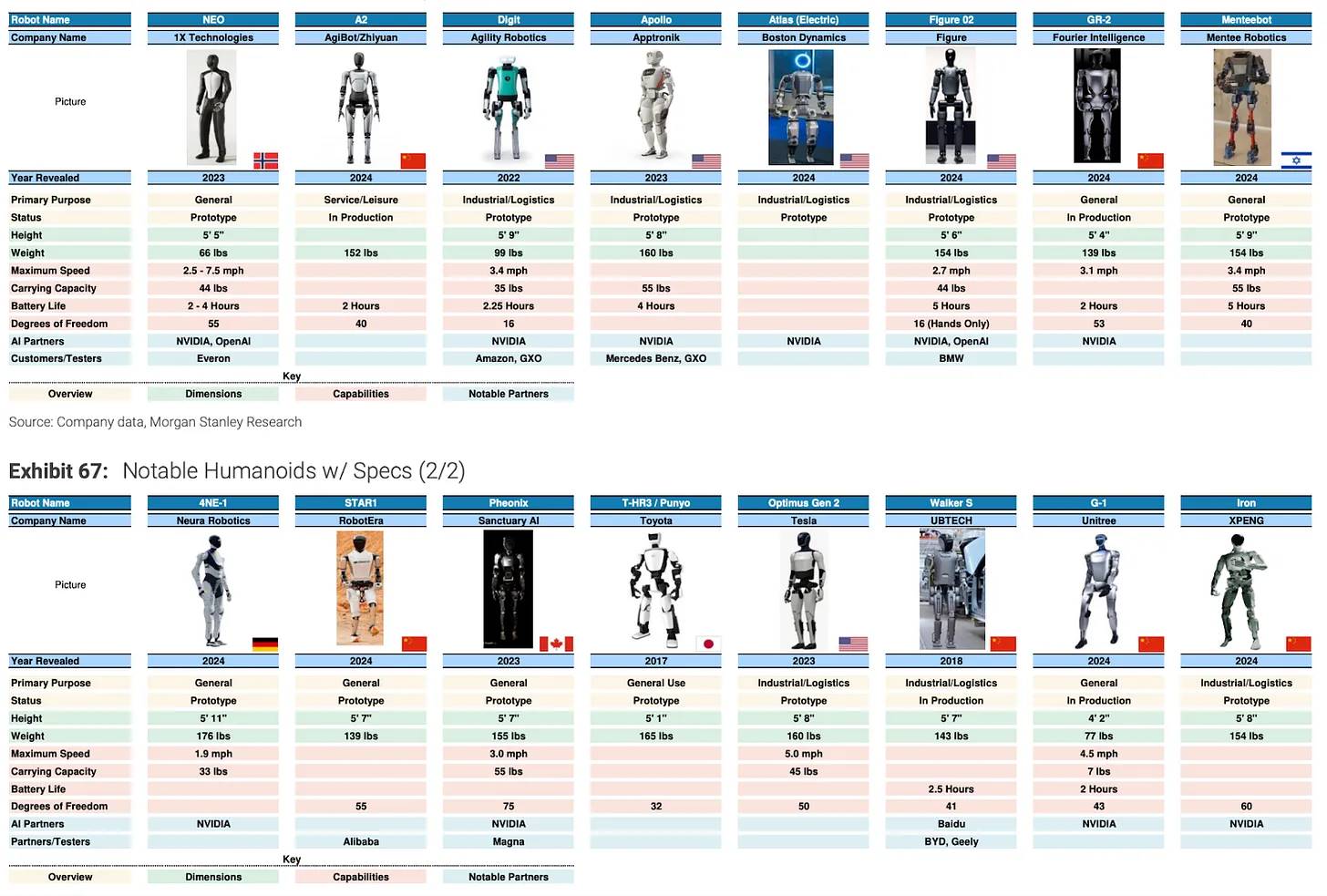
출처: 모건스탠리, 『휴머노이드 100: 휴머노이드 로봇 가치 사슬 지도』
이러한 진보는 다음과 같은 세 가지 핵심 구성 요소에서의 기술적 돌파구 덕분이다:
-
액추에이터(Actuators): 로봇의 "근육" 역할을 하는 액추에이터는 디지털 명령을 정밀한 운동으로 변환한다. 고품질 모터의 혁신은 로봇이 빠르고 정확한 동작을 수행할 수 있게 하며, 유전 탄성체 액추에이터(DEAs)는 섬세한 작업에 적합하다. 이러한 기술들은 로봇의 유연성을 크게 향상시켰으며, 예를 들어 테슬라의 옵티머스 Gen 2는 자유도(DoF) 22개를 갖추었고, 유니트리의 G1 역시 인간에 가까운 유연성과 인상적인 이동 능력을 보여준다.
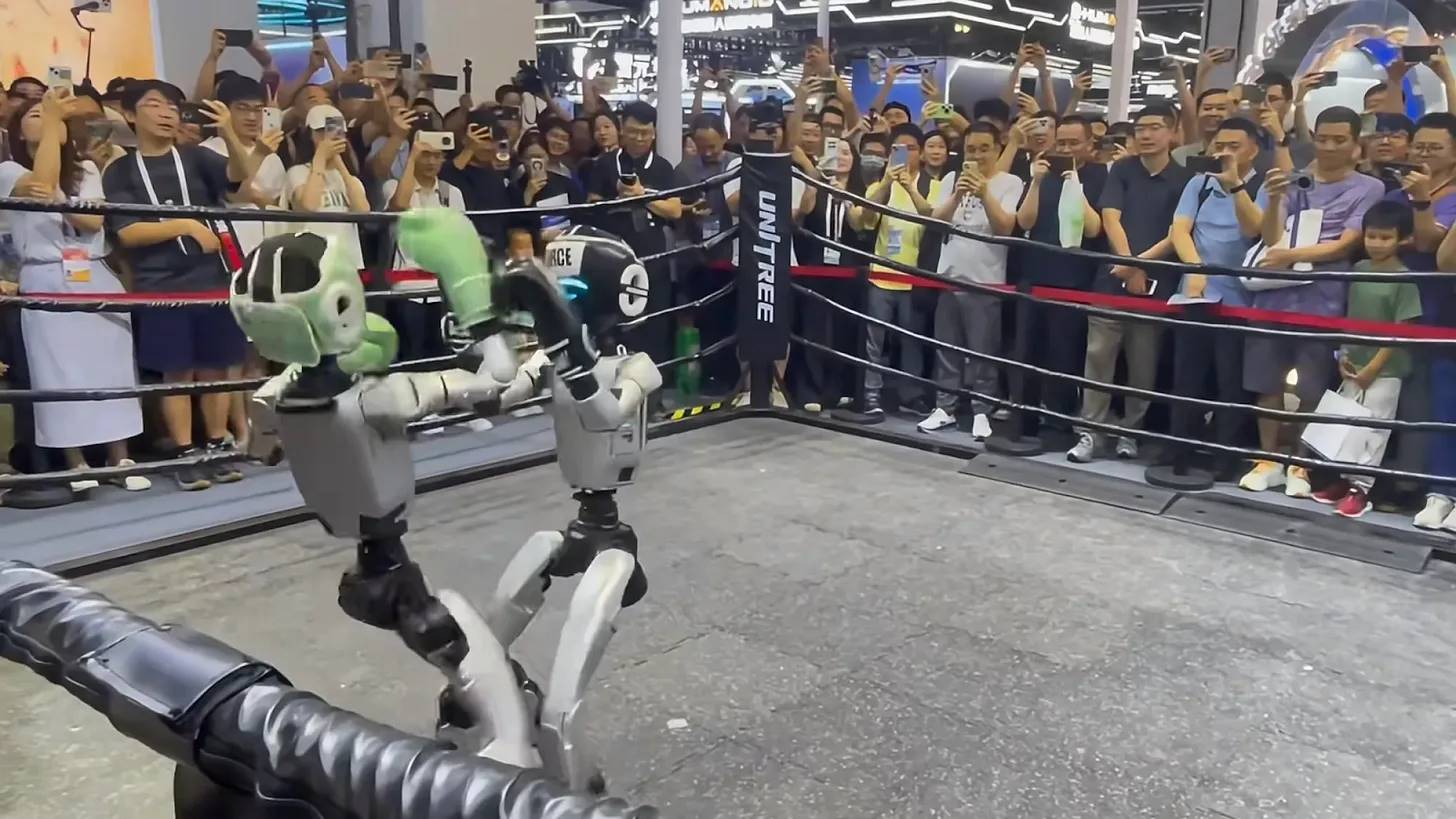
출처: 유니트리가 2025년 WAIC 세계 인공지능 대회에서 최신 인간형 로봇의 권투 경기를 시연
-
센서(Sensors): 고급 센서는 시각, LIDAR/RADAR, 촉각 및 오디오 입력을 통해 로봇이 환경을 감지하고 해석할 수 있도록 한다. 이러한 기술은 안전한 내비게이션, 정밀한 조작 및 상황 인식을 지원한다.
-
임베디드 컴퓨팅(Embedded Computing): 장치 내 CPU, GPU 및 TPU, NPU와 같은 AI 가속기는 센서 데이터를 실시간으로 처리하고 AI 모델을 실행하여 자율적인 의사결정을 가능하게 한다. 신뢰할 수 있는 저지연 연결은 원활한 조율을 보장하며, 하이브리드 엣지-클라우드 아키텍처는 필요 시 집약적인 연산 작업을 오프로드할 수 있게 한다.
1.2 지능 계층: "두뇌"
하드웨어가 점점 성숙해짐에 따라 업계의 관심사는 "로봇 두뇌" 구축으로 옮겨갔다: 강력한 기초 모델과 고도화된 제어 전략.
AI 통합 이전에는 로봇이 사전에 프로그래밍된 동작을 수행하는 규칙 기반 자동화에 의존했으며, 적응형 지능은 부족했다.
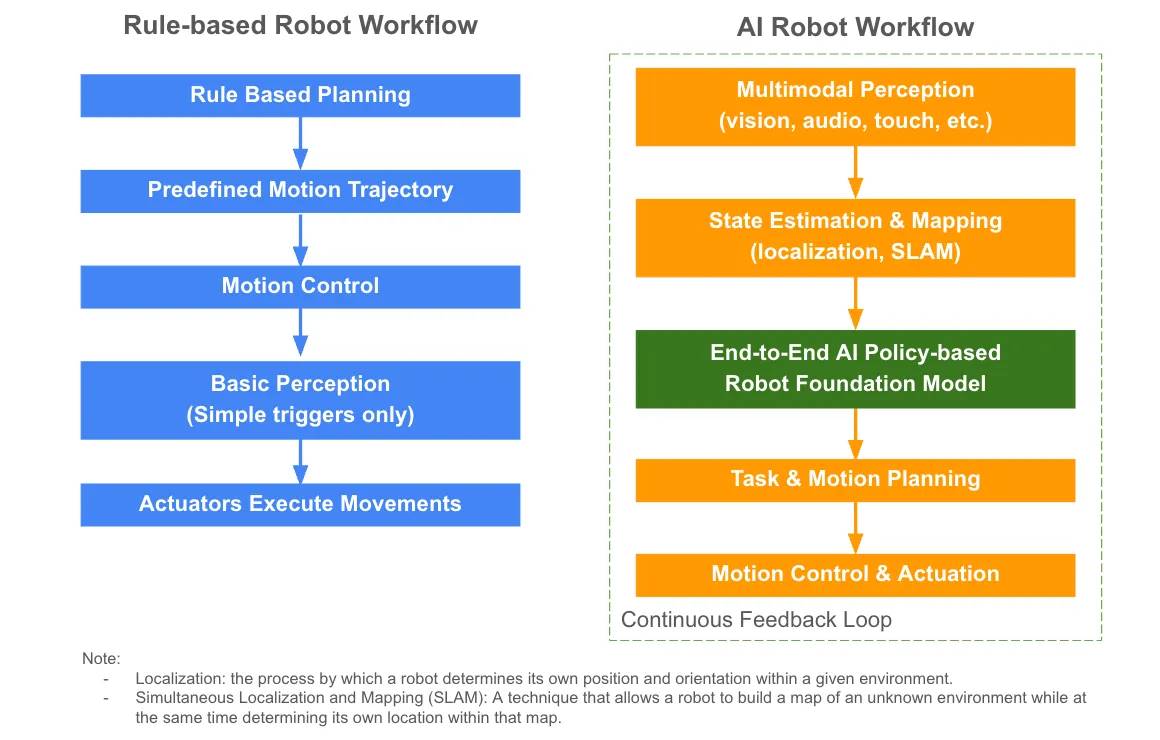
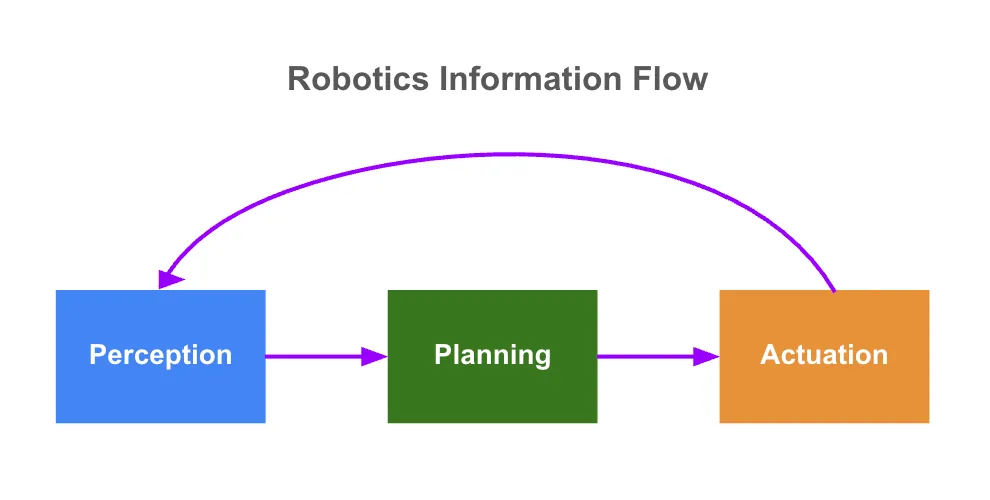
기초 모델은 점차 로봇 분야에 적용되기 시작했다. 그러나 일반적인 대규모 언어 모델(LLMs)만으로는 충분하지 않다. 로봇은 동적인 물리적 환경에서 감지, 추론, 행동해야 하기 때문이다. 이러한 요구를 충족하기 위해 업계는 전략 기반의 엔드투엔드 로봇 기초 모델 개발에 나서고 있다. 이러한 모델은 로봇이 다음을 수행할 수 있게 한다:
-
감지(Perceive): 다중 모달 센서 데이터(시각, 음성, 촉각)를 수신
-
계획(Plan): 자신의 상태를 추정하고, 환경 지도를 작성하며, 복잡한 지시를 해석하고, 감지를 직접 행동에 매핑하여 수작업 개입을 줄임
-
행동(Act): 운동 계획을 생성하고 실시간 실행을 위한 제어 명령을 출력
이러한 모델은 세상과 상호작용하는 일반적인 "전략"을 학습하여, 로봇이 다양한 작업에 적응하고 더 높은 수준의 지능과 자율성으로 작동할 수 있게 한다. 고급 모델은 지속적인 피드백을 활용하여 로봇이 경험에서 학습하고, 동적 환경에서 적응력을 더욱 강화할 수 있다.
VLA 모델은 감각 입력(주로 시각 데이터와 자연어 지시)을 로봇의 행동으로 직접 매핑하여, 로봇이 "보는 것"과 "듣는 것"에 따라 적절한 제어 명령을 내릴 수 있게 한다. 대표적인 예로는 구글의 RT-2, 엔비디아의 아이작 GR00T N1, 그리고 피지컬 인텔리전스(Physical Intelligence)의 π0 등이 있다.
이러한 모델을 강화하기 위해 종종 여러 보완적 방법들을 통합한다:
-
월드 모델(World Models): 물리적 환경의 내부 시뮬레이션을 구축하여, 로봇이 복잡한 행동을 학습하고 결과를 예측하며 행동을 계획할 수 있도록 돕는다. 예를 들어, 최근 구글이 발표한 Genie 3은 전례 없는 다양성의 상호작용 환경을 생성할 수 있는 범용 월드 모델이다.
-
딥 리인포스먼트 러닝(Deep Reinforcement Learning): 시행착오를 통해 로봇이 행동을 학습하도록 돕는다.
-
원격 조작(Teleoperation): 원거리에서 제어하고 훈련 데이터를 제공한다.
-
데모 기반 학습(LfD)/모방 학습(Imitation Learning): 인간의 동작을 모방하여 로봇에게 새로운 기술을 가르친다.
다음 그림은 이러한 방법들이 로봇 기초 모델 내에서 어떻게 작용하는지를 보여준다.
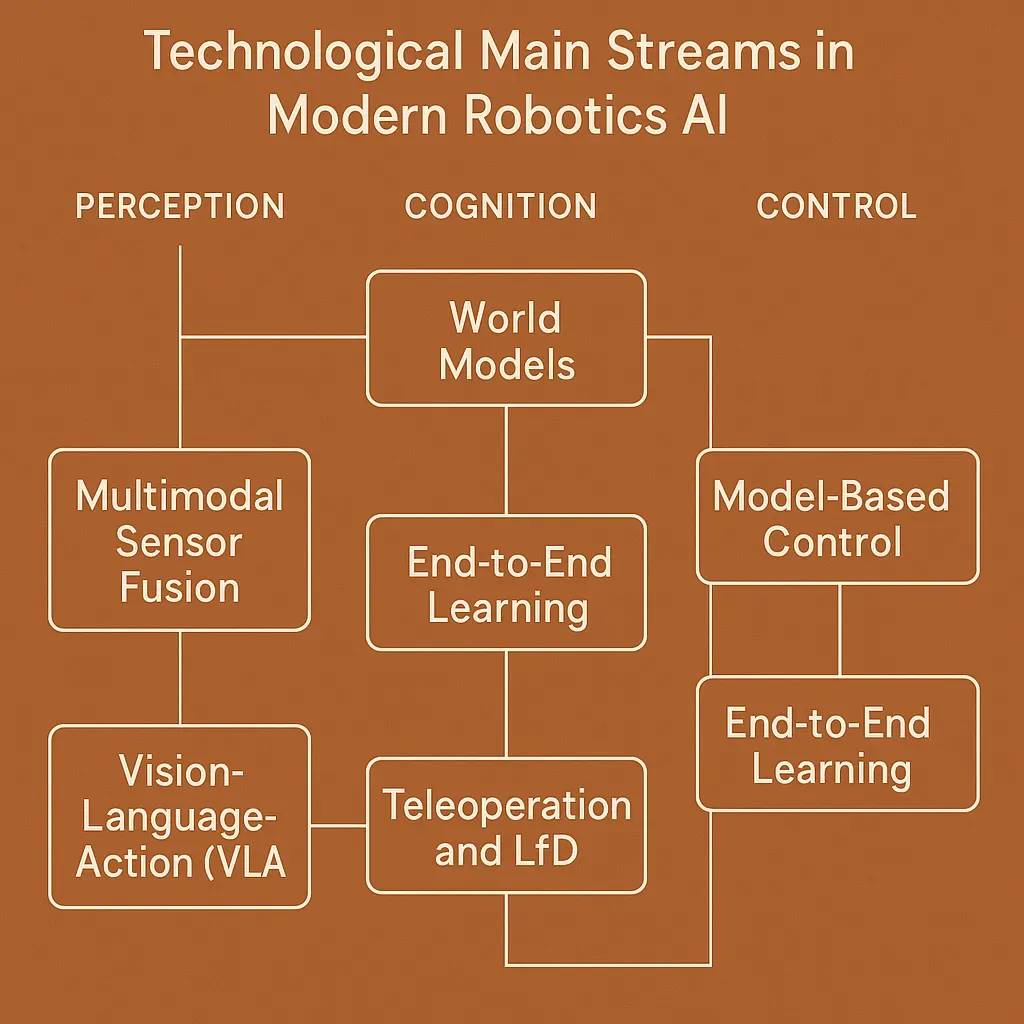
출처: 월드 모델: AGI를 향한 물리적 지능의 핵심 (World models: the physical intelligence core driving us toward AGI)
최근 피지컬 인텔리전스의 π0 및 엔비디아의 아이작 GR00T N1과 같은 일부 오픈소스 돌파구는 해당 분야의 중요한 진전을 의미한다. 그러나 대부분의 로봇 기초 모델은 여전히 중심화되고 폐쇄되어 있다. 코바리언트(Covariant), 테슬라 등의 회사들은 여전히 독점 코드와 데이터셋을 보유하고 있는데, 이는 주로 개방형 인센티브 메커니즘의 부재 때문이다.
이러한 투명성의 결여는 로봇 플랫폼 간의 협업과 상호운용성을 제한하며, 안전하고 투명한 모델 공유, 체인 상 커뮤니티 거버넌스 기준, 장치 간 상호운용성 계층에 대한 필요성을 부각시킨다. 이러한 접근법은 신뢰와 협력을 증진시키고, 해당 분야의 더 강력한 발전을 추진할 것이다.
1.3 데이터 계층: 두뇌의 "지식"
강력한 로봇 데이터셋은 세 가지 기둥에 의존한다: 양, 질, 다양성.
산업계가 데이터 축적에 노력을 기울였음에도 불구하고, 기존의 로봇 데이터셋 규모는 여전히 턱없이 부족하다. 예를 들어 OpenAI의 GPT-3는 3000억 개의 토큰으로 훈련되었지만, 가장 큰 오픈소스 로봇 데이터셋인 Open X-Embodiment은 22종의 로봇을 포함하는 100만 개 이상의 실제 로봇 궤적만을 포함한다. 이는 강력한 일반화 능력을 실현하기 위해 필요한 데이터 규모와 비교하면 거대한 격차가 있다.
테슬라가 데이터 팩토리를 통해 작업자들에게 모션 캡처 슈트를 입혀 훈련 데이터를 수집하는 것과 같은 일부 독점적 방법은 실제로 더 많은 실제 운동 데이터 수집에 도움이 되지만, 비용이 매우 비싸며 데이터 다양성이 제한되고 확장하기 어렵다.
이러한 과제들을 해결하기 위해 로봇 분야는 다음 세 가지 주요 데이터 소스를 활용하고 있다:
-
인터넷 데이터: 인터넷 데이터는 규모가 크고 확장하기 쉽지만, 주로 관찰 데이터이며 센서와 운동 신호가 부족하다. 인터넷 데이터를 기반으로 GPT-4V 및 Gemini와 같은 대규모 비전 언어 모델을 사전 훈련함으로써 유용한 의미 및 시각적 사전 정보를 제공할 수 있다. 또한 영상에 운동학적 라벨을 추가하면 원본 영상을 조작 가능한 훈련 데이터로 변환할 수 있다.
-
합성 데이터: 시뮬레이션을 통해 생성된 합성 데이터는 대규모 실험을 신속하게 수행하고 다양한 시나리오를 포괄할 수 있지만, 현실 세계의 복잡성을 완전히 반영할 수 없으며, 이 한계를 "시뮬레이션-현실 갭(sim-to-real gap)"이라고 한다. 연구자들은 도메인 적응(예: 데이터 증강, 도메인 무작위화, 적대적 학습) 및 시뮬레이션-현실 전이 기술을 통해 이 문제를 해결하며, 모델을 반복적으로 최적화하고 실제 환경에서 테스트 및 미세 조정을 수행한다.
-
현실 세계 데이터: 드물고 비용이 많이 들지만, 현실 세계 데이터는 모델의 실제 적용과 시뮬레이션과 실제 배포 사이의 격차를 메우는 데 매우 중요하다. 고품질의 실제 데이터는 일반적으로 로봇이 작업 중에 "보는 것"을 기록하는 제1자 시점(egocentric views)과 정밀한 동작을 기록하는 운동 데이터를 포함한다. 운동 데이터는 인간의 데모 또는 원격 조작을 통해 수집되며, VR, 모션 캡처 장치 또는 촉각 교육을 활용하여 모델이 정확한 실제 사례에서 학습할 수 있도록 보장한다.
연구에 따르면, 인터넷 데이터, 현실 세계 데이터, 합성 데이터를 결합하여 로봇을 훈련시키는 것은 단일 데이터 소스에 의존하는 것보다 훨씬 더 효율적이고 모델의 강건성(robustness)(심조 주: 시스템이 비정상적이거나 위험한 상황에서도 건강하고 튼튼하게 유지되는 특성)을 크게 향상시킨다.
동시에 데이터 양을 늘리는 것도 도움이 되지만, 특히 새로운 작업과 로봇 형태에 대한 일반화를 위해서는 데이터의 다양성이 더욱 중요하다. 이러한 다양성을 실현하기 위해서는 개방형 데이터 플랫폼과 협업적 데이터 공유가 필요하며, 다양한 로봇 형태를 지원하는 크로스 인스턴스 데이터셋을 생성함으로써 더 강력한 기초 모델 개발을 촉진해야 한다.
1.4 에이전트 계층: "물리적 AI 에이전트"
물리적 AI 에이전트로서의 발전 추세는 가속화되고 있으며, 이러한 자율 로봇은 현실 세계에서 독립적으로 행동할 수 있다. 에이전트 계층의 발전은 모델의 미세 조정, 지속적 학습, 각 로봇의 고유한 형태에 맞춘 실제 적응에 달려 있다.
물리적 AI 에이전트의 발전을 가속화할 수 있는 몇 가지 새롭게 떠오르는 기회는 다음과 같다:
-
지속적 학습 및 적응형 인프라: 실시간 피드백 루프와 배포 중 공유 경험을 통해 로봇이 지속적으로 개선될 수 있도록 함
-
자율 에이전트 경제: 로봇이 독립된 경제주체로서 운영됨—로봇 간 시장에서 컴퓨팅 능력, 센서 데이터 등의 자원을 거래하고, 토큰화된 서비스를 통해 수익을 창출함
-
멀티 에이전트 시스템: 차세대 플랫폼과 알고리즘이 로봇 군집이 조율되고 협력하며 집단 행동을 최적화할 수 있도록 함
AI 로봇과 Web3의 융합: 거대한 시장 잠재력의 해방
AI 로봇이 연구 단계에서 현실 세계로 실제 배포로 나아가면서, 장기간 존재했던 여러 병목 현상들이 혁신을 방해하고 있으며, 로봇 생태계의 확장성, 강건성, 경제적 실현 가능성을 제한하고 있다. 이러한 병목 현상에는 데이터와 모델의 중심화된 정보 독립, 신뢰와 추적 가능성의 결여, 프라이버시 및 규정 준수 제한, 상호운용성 부족이 포함된다.
2.1 AI 로봇이 직면한 고통점
-
중심화된 데이터 및 모델 정보 독립
로봇 모델은 방대하고 다양한 데이터셋을 필요로 한다. 그러나 오늘날의 데이터 및 모델 개발은 고도로 중심화되어 있고, 분산되어 있으며, 비용이 많이 들기 때문에 시스템이 분열되고, 적응성이 낮아진다. 동적인 현실 환경에 배포된 로봇은 종종 데이터 다양성 부족과 모델 강건성 제한으로 인해 성능이 저하된다.
-
신뢰, 추적 가능성 및 신뢰성
데이터 출처, 모델 훈련 과정, 로봇 운영 이력 등을 포함한 투명하고 감사 가능한 기록의 부재는 신뢰와 책임감을 약화시킨다. 이는 사용자, 규제기관, 기업이 로봇을 채택하는 주요 장애물이 된다.
-
프라이버시, 보안 및 규정 준수
의료 및 가정용 로봇과 같은 민감한 응용 분야에서는 프라이버시 보호가 매우 중요하며, 유럽의 GDPR(일반 데이터 보호 규정)과 같은 엄격한 지역 규제를 준수해야 한다. 중심화된 인프라는 안전하고 프라이버시를 보호하는 AI 협업을 지원하기 어렵기 때문에 데이터 공유가 제한되고, 규제되거나 민감한 분야에서의 혁신이 억제된다.
-
확장성 및 상호운용성
로봇 시스템은 자원 공유, 공동 학습, 다양한 플랫폼 및 형태 간 통합에서 중대한 도전에 직면한다. 이러한 제한은 네트워크 효과를 분열시키고, 다양한 로봇 유형 간 능력 이전을 방해한다.
2.2 AI 로봇 x Web3: 투자 가능한 기회를 이끄는 구조적 솔루션
Web3 기술은 탈중앙화되고 검증 가능하며 프라이버시를 보호하고 협업하는 로봇 네트워크를 통해 위에서 언급한 고통점을 근본적으로 해결한다. 이러한 융합은 새로운 투자 시장 기회를 열고 있다:
-
탈중앙화된 협업 개발: 인센티브 기반 네트워크를 통해 로봇이 데이터를 공유하고, 모델과 지능형 에이전트를 공동 개발할 수 있음
-
검증 가능한 추적 가능성 및 책임: 블록체인 기술은 데이터 및 모델의 출처, 로봇 신원, 운영 이력을 불변하게 기록하여 신뢰와 규정 준수에 필수적임
-
프라이버시 보호 협업: 고급 암호화 솔루션을 통해 로봇이 독점적이거나 민감한 데이터를 노출하지 않고도 모델을 공동 훈련하고 통찰을 공유할 수 있음
-
커뮤니티 주도 거버넌스: 탈중앙화 자율 조직(DAO)은 체인 상에서 투명하고 포괄적인 규칙과 정책을 통해 로봇 운영을 지도하고 감독함
-
형태 간 상호운용성: 블록체인 기반의 오픈 프레임워크는 서로 다른 로봇 플랫폼 간의 원활한 협업을 촉진하여 개발 비용을 낮추고 능력 이전을 가속화함
-
자율 에이전트 경제: Web3 인프라는 로봇에게 독립적인 경제 에이전트 신분을 부여하여, 인간의 개입 없이 P2P 거래, 협상, 토큰화된 시장 참여가 가능하게 함
-
탈중앙화 물리적 인프라 네트워크(DePIN): 블록체인 기반의 P2P 컴퓨팅, 감지, 저장, 연결 공유는 로봇 네트워크의 확장성과 탄성을 강화함
다음은 해당 분야 발전을 주도하고 있는 혁신적인 프로젝트들로, AI 로봇과 Web3 융합의 잠재력과 추세를 보여준다. 물론 이것은 참고용이며 투자 권유를 의미하지 않는다.
탈중앙화된 데이터 및 모델 개발
Web3 기반 플랫폼은 기여자(모션 캡처슈트, 센서 공유, 영상 업로드, 데이터 라벨링, 심지어 합성 데이터 생성 등) 참여를 인센티브로 유도하여 데이터 및 모델 개발의 민주화를 실현한다. 이러한 접근법은 단일 기업이 달성할 수 있는 범위를 훨씬 초월하여 더 풍부하고, 다양하며, 대표적인 데이터셋과 모델을 구축할 수 있다. 탈중앙화된 프레임워크는 예측 불가능한 환경에서 작동하는 로봇에게 중요한 경계 사례(boundary cases)에 대한 커버리지도 향상시킨다.
사례:
-
Frodobots: 로봇 게임을 통해 현실 세계 데이터셋을 대중화하는 프로토콜. '도시 탐사 로봇(Earth Rovers)' 프로젝트를 출시했는데, 이는 보도블록 로봇과 글로벌 'Drive to Earn' 게임으로, FrodoBots 2K Dataset 데이터셋을 성공적으로 구축하였다. 이 데이터셋은 카메라 영상, GPS 데이터, 오디오 기록, 인간 조작 데이터를 포함하며, 10개 이상의 도시를 커버하고 약 2000시간의 원격 조작 로봇 운전 데이터를 누적하였다.
-
BitRobot: FrodoBots Lab과 Protocol Labs가 공동 개발한 암호화 인센티브 플랫폼으로, 솔라나 블록체인 및 서브넷 아키텍처 기반을 사용한다. 각 서브넷은 공개 도전 과제로 설정되며, 기여자는 모델이나 데이터를 제출하여 토큰 보상을 받는다. 이를 통해 글로벌 협업과 오픈소스 혁신을 촉진한다.
-
Reborn Network: AGI 로봇 오픈 생태계의 기반 계층으로, 복잡한 인간형 로봇 데이터셋의 공개화를 지원하기 위해 Rebocap 모션 캡처슈트를 제공하여 누구나 자신의 실제 운동 데이터를 기록하고 수익을 창출할 수 있도록 한다.
-
PrismaX: 전 세계 커뮤니티 기여자의 힘을 활용하여, 탈중앙화된 인프라를 통해 데이터 다양성과 진위성을 보장하며 강력한 검증 및 인센티브 메커니즘을 시행함으로써 로봇 데이터셋의 대규모 확장을 추진한다.
추적 가능성 및 신뢰성 증명
블록체인 기술은 로봇 생태계에 엔드투엔드의 투명성과 책임 소재를 제공한다. 데이터 및 모델의 검증 가능한 추적 가능성을 보장하고, 로봇 신원과 물리적 위치를 인증하며, 운영 이력 및 기여자 참여 기록을 명확하게 유지한다. 또한 협업적 검증, 체인 상 평판 시스템, 지분 기반 검증 메커니즘은 데이터 및 모델 품질을 보장하여 저품질 또는 사기성 입력이 생태계를 파괴하는 것을 방지한다.
사례:
-
OpenLedger: 커뮤니티 소유 데이터셋을 활용해 전용 모델을 훈련하고 배포하는 AI 블록체인 인프라. '소유권 증명(Proof of Attribution)' 메커니즘을 통해 고품질 데이터 기여자가 공정한 보상을 받도록 보장함
토큰화된 소유권, 라이선스 및 수익화
Web3 고유의 지적 재산 도구는 전용 데이터셋, 로봇 기능, 모델, 지능형 에이전트의 토큰화 라이선스를 지원한다. 기여자는 스마트 계약을 사용하여 자신의 자산에 라이선스 조건을 직접 포함시켜 데이터나 모델이 재사용되거나 수익화될 때 자동으로 로열티를 받을 수 있도록 할 수 있다. 이러한 접근법은 투명하고 허가 없이 접근 가능한 환경을 촉진하며, 로봇 데이터 및 모델을 위한 개방적이고 공정한 시장을 창출한다.
사례:
-
Poseidon: IP 중심의 Story 프로토콜을 기반으로 구축된 전체 스택 탈중앙화 데이터 계층으로, 법적 권한을 갖춘 AI 훈련 데이터를 제공함
프라이버시 보호 솔루션
병원, 호텔 객실 또는 가정과 같은 장소에서 생성되는 고가치 데이터는 공공 채널을 통해 얻기 어렵지만, 풍부한 맥락 정보를 포함하고 있어 기초 모델의 성능을 크게 향상시킬 수 있다. 암호화 솔루션을 통해 개인정보를 체인 상 자산으로 전환하여 추적 가능하고, 조합 가능하며, 수익화 가능하게 하면서도 프라이버시를 보호할 수 있다. 신뢰할 수 있는 실행 환경(TEEs)과 제로지식 증명(ZKPs) 기술은 원본 데이터를 노출하지 않고도 안전한 계산과 결과 검증을 지원한다. 이러한 도구는 조직이 분산된 민감한 데이터 상에서 AI 모델을 훈련하면서도 프라이버시와 규정 준수를 유지할 수 있게 한다.
사례:
-
Phala Network: 개발자가 애플리케이션을 안전한 TEE에 배포하여 기밀 AI 및 데이터 처리를 수행할 수 있도록 함
개방적이고 감사 가능한 거버넌스
로봇 훈련은 종종 투명성과 적응성이 부족한 독점 블랙박스 시스템에 의존한다. 위험을 줄이고 사용자, 규제기관, 기업의 신뢰를 강화하기 위해서는 투명하고 검증 가능한 거버넌스가 필수적이다. Web3 기술은 체인 상 커뮤니티 주도 감독을 통해 오픈소스 로봇 지능의 협업 개발을 실현한다.
사례:
-
Openmind: 로봇이 생각하고, 학습하고, 협업할 수 있도록 돕는 개방형 AI 고유 소프트웨어 스택. 인간과 로봇 사회를 위한 ERC7777 표준을 제안하였으며, 이는 검증 가능한 규칙 기반 로봇 생태계를 구축하는 것을 목표로 하며, 보안성, 투명성, 확장성에 중점을 둔다. 이 표준은 인간과 로봇 신원 관리, 사회적 규칙 세트 실행, 참여자 등록 및 제거를 위한 표준화된 인터페이스를 정의하며, 관련 권리와 책임을 명확히 한다.
마지막 생각
AI 로봇과 Web3 기술의 융합과 함께 우리는 자율 시스템이 대규모 협업과 적응을 실현할 수 있는 완전히 새로운 시대로 접어들고 있다. 앞으로 3~5년이 핵심적인 시기가 될 것이며, 하드웨어의 급속한 발전은 더 강력한 AI 모델의 출현을 이끌 것이고, 이러한 모델은 더 풍부한 현실 세계 데이터셋과 탈중앙화된 협업 메커니즘에 기반을 둘 것이다. 우리는 호텔업, 물류 등 여러 산업 분야에서 전용 AI 에이전트가 등장하여 거대한 새로운 시장 기회를 창출할 것으로 예상한다.
그러나 AI 로봇과 암호 기술의 융합은 도전도 동반한다. 균형 잡히고 효과적인 인센티브 메커니즘 설계는 여전히 복잡하며 계속 진화하고 있으며, 기여자에게 공정하게 보상하면서 남용을 방지해야 한다. 기술적 복잡성 또한 큰 난제로, 다양한 로봇 유형의 원활한 통합을 실현하기 위한 견고하고 확장 가능한 솔루션이 시급히 필요하다. 또한 프라이버시 보호 기술은 민감한 데이터를 처리할 때 이해관계자의 신뢰를 얻을 만큼 충분히 신뢰할 수 있어야 한다. 빠르게 변화하는 규제 환경 또한 다양한 사법 관할권 내에서 규정 준수를 보장하기 위해 신중한 대응을 요구한다. 이러한 리스크를 해결하고 지속 가능한 수익을 실현하는 것이 기술 발전과 광범위한 적용을 추진하는 핵심이다.
이 분야의 발전을 함께 주목하며, 협력을 통해 진보를 이루고, 급속히 확장되는 시장에서 나타나는 기회를 잡아보자.
로봇 기술의 혁신은 함께 걸어가는 것이 가장 좋은 여정이다 :)
마지막으로, 내 연구에 소중한 지원을 제공한 Chain of Thought의 『로보틱스와 물리적 인공지능의 시대(Robotics & The Age of Physical AI)』에 감사의 말씀을 전한다.
TechFlow 공식 커뮤니티에 오신 것을 환영합니다
Telegram 구독 그룹:https://t.me/TechFlowDaily
트위터 공식 계정:https://x.com/TechFlowPost
트위터 영어 계정:https://x.com/BlockFlow_News