

IOSG|ロボット産業への展望:自動化、人工知能とWeb3の融合進化
TechFlow厳選深潮セレクト
IOSG|ロボット産業への展望:自動化、人工知能とWeb3の融合進化
ロボット × AI × Web3 の交差点は、依然として次世代の知能経済システムの原点を表している。
著者:Jacob Zhao @IOSG
ロボット全景:産業用オートメーションからヒューマノイド知能へ
従来のロボット産業チェーンは、下流から上流への完全な階層構造を形成しており、コア部品・中間制御システム・整機製造・アプリケーション統合の4つの主要環節で構成されています。コア部品(コントローラー、サーボ、減速機、センサー、バッテリーなど)は技術的ハードルが最も高く、整機の性能とコスト下限を決定します。制御システムはロボットの「脳」と「小脳」であり、意思決定、計画立案、運動制御を担います。整機製造はサプライチェーン統合能力を体現します。システム統合と応用は商業化の深さを決定し、新たな価値の中心となっています。
用途と形態別に見ると、世界のロボットは「産業用オートメーション → シナリオ知能化 → 汎用知能化」という進化の道を歩み、5つの主要タイプに分かれています:工業用ロボット、移動型ロボット、サービスロボット、特殊用途ロボット、そしてヒューマノイドロボットです。
#工業用ロボット(Industrial Robots)
現在唯一全面的に成熟した分野であり、溶接、組立、塗装、搬送などの製造工程に広く使用されています。業界は標準化されたサプライチェーン体制を確立しており、粗利益率は安定しており、投資収益率(ROI)も明確です。その中の協働ロボット(Cobots)は人間との共同作業、軽量かつ設置容易性を重視しており、成長が最も速いカテゴリーです。
代表企業:ABB、ファナック (Fanuc)、安川電機(Yaskawa)、クーカ(KUKA)、Universal Robots、節卡、遨博。
#移動型ロボット(Mobile Robots)
AGV(自動導引車)およびAMR(自律移動ロボット)を含み、物流倉庫、EC配送、製造輸送などで大規模に展開されており、BtoB市場では最も成熟したカテゴリーとなっています。
代表企業:Amazon Robotics、極智嘉 (Geek+)、快倉(Quicktron)、Locus Robotics。
#サービスロボット(Service Robots)
清掃、飲食、ホテル、教育などの業界向けであり、消費者側での成長が最も速い領域です。清掃用品はすでに家電製品の論理に組み込まれており、医療や商用配送の商業化も加速しています。さらに、より汎用的な操作型ロボットも登場しつつあります(例:Dynaの二腕システム)――タスク特化型製品よりも柔軟ですが、ヒューマノイドロボットほどの汎用性にはまだ達していません。
代表企業:エコバックス、石頭科技、普渡科技、擎朗智能、iRobot、 Dyna など。
#特殊用途ロボット
主に医療、軍事、建設、海洋、宇宙などの分野にサービスを提供しており、市場規模は限定的ですが、利益率が高く、参入障壁も強く、政府や企業からの発注に依存する垂直専門分野として成長段階にあります。代表プロジェクトには直感外科学、Boston Dynamics、ANYbotics、NASA Valkyrieなどがあります。
#ヒューマノイドロボット(Humanoid Robots)
将来の「汎用工学労働力プラットフォーム」として位置づけられています。
代表企業:Tesla(Optimus)、Figure AI(Figure 01)、Sanctuary AI (Phoenix)、Agility Robotics(Digit)、Apptronik (Apollo)、1X Robotics、Neura Robotics、宇樹科技(Unitree)、優必選(UBTECH)、智元ロボティクスなど。
ヒューマノイドロボットは現在最も注目されている先端分野であり、その本質的価値は人間の形態に合わせて既存の社会空間に適応できることにあります。これは「汎用工学労働力プラットフォーム」への鍵となる形態とされています。工業用ロボットが極限の効率を追求するのに対し、ヒューマノイドロボットは汎用適応性とタスク移行能力を重視し、環境改造なしに工場、家庭、公共空間に入ることができます。
現在、大多数のヒューマノイドロボットはまだ技術デモ段階にあり、主に動的バランス、歩行、操作能力の検証を行っています。一部のプロジェクトは高度に制御された工場環境で小規模な展開を開始しています(例:Figure × BMW、Agility Digit)、また2026年以降に1Xなど複数のメーカーが早期配布を予定していますが、これらは依然として「狭いシナリオ、単一タスク」の制限された応用であり、真の意味での汎用工学労働力とは言えません。全体としては、大規模商業化までにはまだ数年の時間を要すると見られます。主な課題には以下が含まれます:多自由度の協調とリアルタイム動的バランスの制御難問、バッテリーのエネルギー密度と駆動効率に起因する消費電力と航続距離問題、開放環境での不安定性、汎用化困難な知覚-意思決定連鎖、顕著なデータ不足(汎用戦略訓練を支えるには不十分)、クロスボディ移行未解決、そしてハードウェアサプライチェーンとコスト曲線(特に中国以外の地域)が現実的な障壁となり、大規模かつ低コストでの展開がさらに難しくなっています。
今後の商業化パスは3段階に分かれる見込みです:短期的には「Demo-as-a-Service」が中心となり、パイロットプロジェクトと補助金に依存します。中期的には「Robotics-as-a-Service (RaaS)」へと進化し、タスクとスキルのエコシステムを構築します。長期的には労働力クラウドとインテリジェントサブスクリプションサービスが中心となり、価値の重点がハードウェア製造からソフトウェアとサービスネットワークへと移行します。総じて、ヒューマノイドロボットはデモから自己学習への重要な過渡期にあり、今後、制御、コスト、アルゴリズムという3つのハードルを乗り越えられるかどうかが、真正の具身知能(Embodied Intelligence)の実現を左右します。
AI × ロボット:具身知能時代の夜明け
従来のオートメーションは主に事前プログラミングと生産ライン式制御(例:感知-計画-制御のDSOPアーキテクチャ)に依存しており、構造化された環境でのみ信頼性を持って動作可能です。しかし現実世界はさらに複雑で変化に富んでおり、新世代の具身知能(Embodied AI)は別のパラダイムを採用しています:大規模モデルと統一表現学習を通じて、ロボットに複数のシナリオにわたる「理解-予測-行動」能力を与えるものです。具身知能は「身体(ハードウェア)+脳(モデル)+環境(インタラクション)」の動的結合を強調し、ロボットは媒体にすぎず、知能こそが核心です。
生成AI(Generative AI)は言語世界の知能であり、記号と意味の理解に長けています。一方、具身知能(Embodied AI)は現実世界の知能であり、知覚と行動を掌握しています。両者はそれぞれ「脳」と「身体」に対応し、AI進化の2つの並列主軸を表しています。知能レベルで見ると、具身知能は生成AIよりも高次元ですが、成熟度は明らかに遅れています。LLMはインターネット上の大量コーパスに依存し、「データ→計算リソース→展開」という明確なフィードバックループを形成しています。一方、ロボット知能は第一人称視点、マルチモーダル、かつ行動に強く結びついたデータを必要とします――遠隔操作の軌跡、第一人称視点映像、空間マップ、操作シーケンスなどであり、これらのデータは自然には存在せず、実際のインタラクションまたは高精度シミュレーションによって生成される必要があります。そのため、非常に希少で高価です。シミュレーションや合成データは助けになりますが、リアルなセンサー-運動経験に取って代わることはできません。これがTesla、Figureなどが自ら遠隔操作データ工場を構築しなければならない理由であり、東南アジアに第三者データアノテーション工場が出現する理由でもあります。要するに:LLMは既存データから学ぶのに対し、ロボットは物理世界とのインタラクションを通じてデータを「創造」しなければなりません。今後5〜10年で、両者はVision–Language–ActionモデルとEmbodied Agentアーキテクチャにおいて深く融合していくでしょう――LLMが高次認知と計画を担当し、ロボットが現実世界での実行を担当することで、データと行動の双方向フィードバックループを形成し、AIを「言語知能」から真の汎用人工知能(AGI)へと推し進めます。
具身知能の核心技术体系は、下流から上流へ向かう知能スタックとして捉えることができます:VLA(知覚融合)、RL/IL/SSL(知能学習)、Sim2Real(現実移行)、World Model(認知モデリング)、そしてマルチエージェント協働と記憶推論(Swarm & Reasoning)。このうち、VLAとRL/IL/SSLは具身知能の「エンジン」となり、その実用化と商業化を決定します。Sim2RealとWorld Modelは仮想トレーニングと現実実行をつなぐキーテクノロジーです。マルチエージェント協働と記憶推論は、集団的およびメタ認知の進化を示す高次元の方向性です。
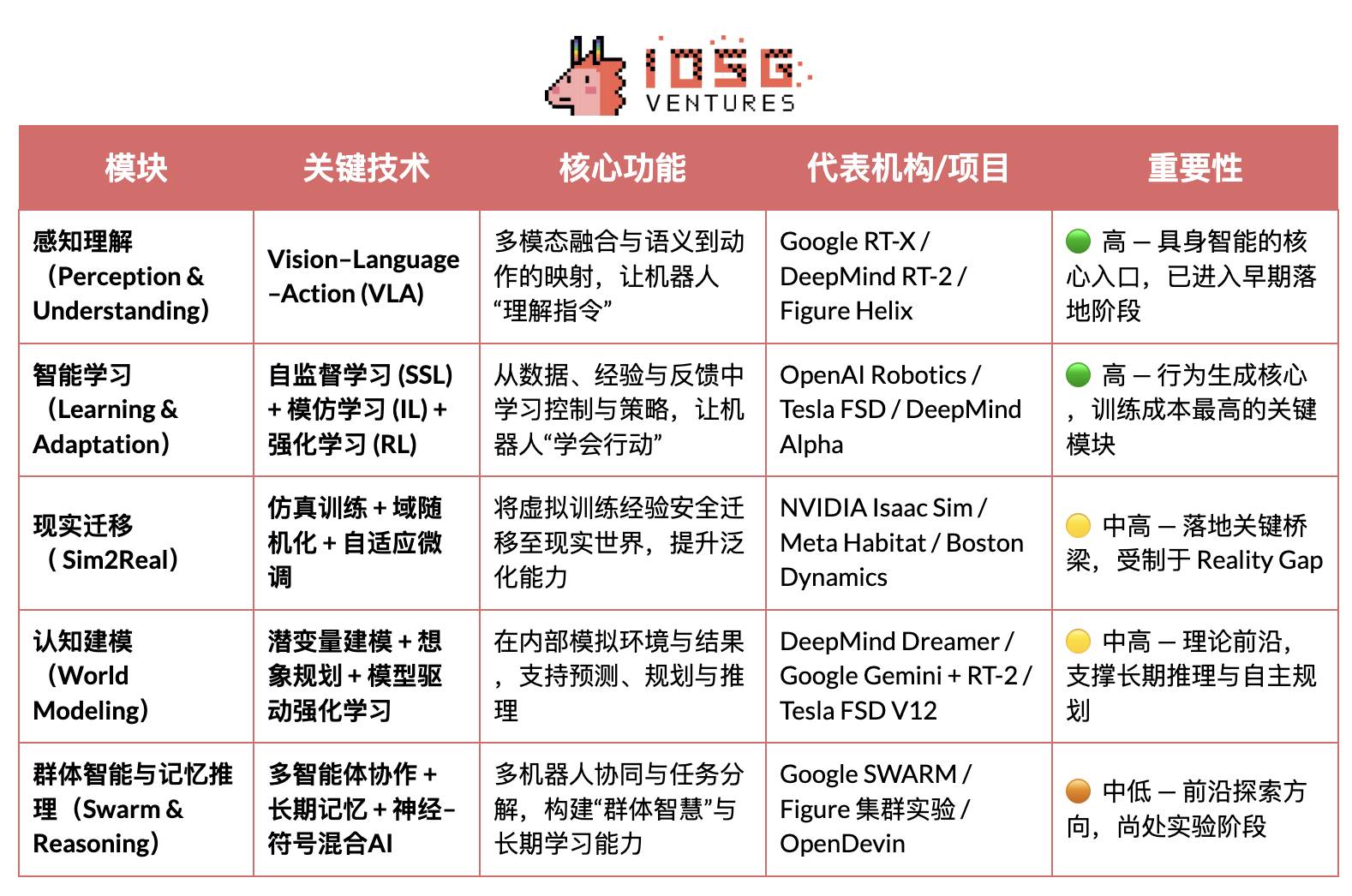
知覚と理解:ビジュアル-言語-行動モデル(Vision–Language–Action)
VLAモデルは、ビジュアル(Vision)・言語(Language)・行動(Action)の3つのチャネルを統合することで、ロボットが人間の言語から意図を理解し、具体的な操作行為に変換できるようにします。その実行プロセスには、意味解析、目標認識(視覚入力から対象物を特定)、経路計画と行動実行が含まれ、「意味理解-世界知覚-タスク完了」という閉ループを実現します。これは具身知能における重要な突破口の一つです。現在の代表プロジェクトにはGoogle RT-X、Meta Ego-Exo、Figure Helixがあり、それぞれクロスモーダル理解、没入型知覚、言語駆動制御といった先端方向を示しています。
現在、VLAは初期段階にあり、以下の4つの主要な課題に直面しています:
-
意味の曖昧性とタスク汎用性の弱さ:モデルはあいまいな、オープンエンドの指示を理解するのが難しい;
-
視覚と行動のアライメントが不安定:知覚誤差が経路計画と実行過程で拡大される;
-
マルチモーダルデータが不足し、標準が統一されていない:収集とアノテーションのコストが高く、規模のあるデータ飛行機関を形成することが難しい;
-
長時間タスクにおける時間軸と空間軸の課題:タスク期間が長くなると計画と記憶能力が不足し、空間範囲が大きくなるとモデルが「視野外」のものを推論する必要があるが、現在のVLAは安定したワールドモデルとクロススペース推論能力に欠ける。
これらの問題は、VLAのクロスシナリオ汎用性と大規模展開プロセスを共に制限しています。
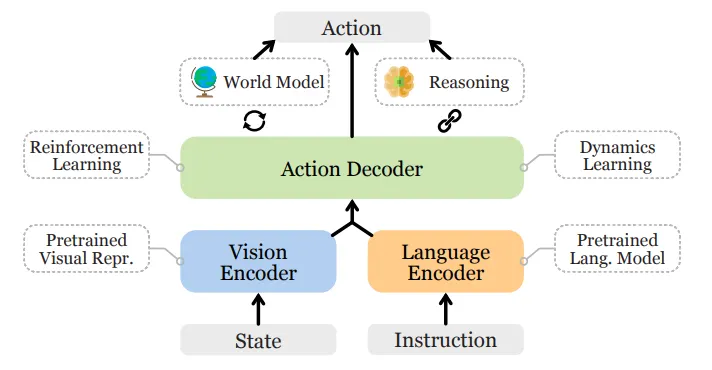
知能学習:自己教師あり学習(SSL)、模倣学習(IL)、強化学習(RL)
-
自己教師あり学習(Self-Supervised Learning):知覚データから自動的に意味的特徴を抽出し、ロボットに「世界を理解させる」。機械に観察と表現の仕方を教えるようなものです。
-
模倣学習(Imitation Learning):人間のデモンストレーションや専門家の例を模倣することで、基礎スキルを迅速に習得する。機械に人間のように行動する方法を教えるようなものです。
-
強化学習(Reinforcement Learning):「報酬-罰則」メカニズムを通じ、試行錯誤の中で行動戦略を最適化する。機械に試行錯誤の中での成長を教えるようなものです。
具身知能(Embodied AI)において、自己教師あり学習(SSL)は、ロボットが知覚データから状態変化や物理法則を予測することで、世界の因果構造を理解することを目指します。強化学習(RL)は知能形成の核心エンジンであり、環境との相互作用と報酬信号に基づく試行錯誤による最適化により、歩行、把持、障害物回避などの複雑な行動を習得させます。模倣学習(IL)は人間のデモンストレーションを通じてこのプロセスを加速し、ロボットに行動の先行知識を迅速に与えます。現在の主流は三者を統合し、階層化された学習フレームワークを構築することです:SSLが表現の基盤を提供し、ILが人間の先行知識を与え、RLが戦略の最適化を推進することで、効率と安定性を両立し、具身知能が「理解」から「行動」へ至る核心メカニズムを共同で構成します。
現実移行:Sim2Real ―― シミュレーションから現実への飛躍
Sim2Real(Simulation to Reality)は、ロボットを仮想環境で訓練し、その後現実世界に移行させる技術です。NVIDIA Isaac SimやOmniverse、DeepMind MuJoCoなどの高精度シミュレーション環境を用いて大規模なインタラクションデータを生成し、訓練コストとハードウェア摩耗を大幅に削減します。その核心は「シミュレーション-現実ギャップ」を縮めることであり、主な手法には以下が含まれます:
-
ドメインランダマイゼーション(Domain Randomization):シミュレーション中に照明、摩擦、ノイズなどのパラメータをランダムに調整し、モデルの汎化能力を向上させる;
-
物理的一貫性較正:実際のセンサーデータを用いてシミュレーションエンジンを較正し、物理的リアリズムを高める;
-
適応微調整(Adaptive Fine-tuning):現実環境で迅速な再訓練を行い、安定した移行を実現する。
Sim2Realは具身知能の実用化における中枢的役割を果たし、AIモデルが安全で低コストの仮想世界で「知覚-意思決定-制御」の閉ループを学ぶことを可能にします。Sim2Realのシミュレーション訓練はすでに成熟しています(例:NVIDIA Isaac Sim、MuJoCo)が、現実移行はReality Gap、高計算負荷、アノテーションコスト、開放環境での汎化性と安全性の不足に制約されています。それでも、Simulation-as-a-Service(SimaaS)は具身知能時代において最もライトウェイトだが戦略的に最も価値のあるインフラストラクチャーとなりつつあり、そのビジネスモデルにはプラットフォームサブスクリプション(PaaS)、データ生成(DaaS)、安全検証(VaaS)が含まれます。
認知モデリング:World Model ―― ロボットの「内なる世界」
ワールドモデル(World Model)は具身知能の「内なる脳」であり、ロボットが内部で環境と行動結果をシミュレートし、予測と推論を行うことを可能にします。環境の動的規則を学習することで、予測可能な内部表現を構築し、実行前に結果を「予演」できるようにすることで、受動的な実行者から能動的な推論者へと進化させます。代表プロジェクトにはDeepMind Dreamer、Google Gemini + RT-2、Tesla FSD V12、NVIDIA WorldSimなどがあります。典型的な技術アプローチには以下が含まれます:
-
潜在変数モデリング(Latent Dynamics Modeling):高次元知覚データを潜在状態空間に圧縮する;
-
時系列予測イメージトレーニング(Imagination-based Planning):モデル内で仮想的な試行錯誤と経路予測を行う;
-
モデル駆動型強化学習(Model-based RL):ワールドモデルを用いて実環境に代わる訓練を行い、訓練コストを削減する。
ワールドモデルは具身知能の理論的最前線にあり、「反応型」から「予測型」知能へと進むための核心的道筋ですが、モデリングの複雑さ、長期予測の不安定性、統一基準の欠如といった課題に直面しています。
群知能と記憶推論:個別行動から協同認知へ
マルチエージェント協働(Multi-Agent Systems)と記憶推論(Memory & Reasoning)は、具身知能が「個体知能」から「群知能」「認知知能」へ進化する2つの重要な方向を示しています。両者は知能システムの協同学習と長期適応能力を支えています。
#マルチエージェント協働(Swarm / Cooperative RL):
共有環境において、複数のエージェントが分散型または協働型の強化学習を通じて協同意思決定とタスク分配を実現することを指します。この分野には既に堅固な研究基盤があり、OpenAI Hide-and-Seek実験ではマルチエージェントによる自発的協働と戦略の出現が示され、DeepMind QMIXやMADDPGアルゴリズムは集中訓練・分散実行の協働フレームワークを提供しています。このような手法は倉庫ロボットのスケジューリング、点検、群制御などのシーンで実証されています。
#記憶と推論(Memory & Reasoning)
エージェントに長期記憶、状況理解、因果推論能力を持たせることを目指し、クロスタスク移行と自己計画の鍵となる方向です。代表的研究にはDeepMind Gato(統一知覚-言語-制御のマルチタスクエージェント)、DeepMind Dreamerシリーズ(ワールドモデルに基づく想像的計画)、Voyagerなどのオープンエンド具身エージェントがあり、外部記憶と自己進化を通じた継続的学習を実現しています。これらのシステムは、ロボットが「過去を覚え、未来を推論」する能力の基礎を築いています。
グローバル具身知能産業構図:協力と競争の共存

グローバルロボット産業は「協力主導、競争深化」の時期にあります。中国のサプライチェーン効率、米国のAI能力、日本の部品精度、欧州の産業基準が、グローバルロボット産業の長期的構図を形作っています。
-
米国は先端AIモデルとソフトウェア分野(DeepMind、OpenAI、NVIDIA)でリードしていますが、この優位性はロボットハードウェアには及んでいません。中国メーカーは反復速度と実際のシナリオでのパフォーマンスで優位性を持っています。米国は『半導体法案』(CHIPS Act)と『インフレ抑制法案』(IRA)を通じて産業回帰を推進しています。
-
中国は大規模製造、垂直統合、政策主導により、部品、自動化工場、ヒューマノイドロボット分野でリードする優位性を確立しており、ハードウェアとサプライチェーン能力が突出しています。宇樹や優必選などはすでに量産化を実現しており、知的決定層へと拡張中です。しかし、アルゴリズムとシミュレーション訓練層では米国との大きな差があります。
-
日本は長年にわたり高精度部品と運動制御技術を独占しており、産業体制は堅固ですが、AIモデルとの融合はまだ初期段階にあり、革新ペースは安定寄りです。
-
韓国はLG、NAVER Labsなどの企業が牽引するコンシューマーロボット普及に秀でており、成熟したサービスロボットエコシステムを有しています。
-
欧州はエンジニアリング体制と安全基準が整っており、1X Roboticsなどが研究開発層で活発ですが、一部の製造工程は海外移管されており、革新の重点は協働と標準化の方向に向いています。
ロボット × AI × Web3:ナラティブビジョンと現実的道筋
2025年、Web3業界にロボットとAIとの融合の新しいナラティブが登場しました。Web3は非中央集権型マシン経済の基盤プロトコルと見なされていますが、異なるレベルでの結合価値と実現可能性には明らかな差があります:
-
ハードウェア製造とサービス層は資本集約的であり、データ閉ループが弱く、Web3は現在のところサプライチェーン金融や機器リースなどの周辺分野でのみ補助的な役割を果たせます;
-
シミュレーションとソフトウェアエコシステム層との適合性は比較的高く、シミュレーションデータや訓練タスクはブロックチェーン上で所有権を確立でき、エージェントやスキルモジュールもNFTやAgent Tokenを通じて資産化できます;
-
プラットフォーム層では、非中央集権型労働力と協働ネットワークが最大のポテンシャルを示しています――Web3はアイデンティティ、インセンティブ、ガバナンスの一体化メカニズムを通じ、信頼できる「マシン労働市場」を段階的に構築し、将来のマシン経済に制度的ひな形を築くことができます。

長期的ビジョンから見ると、協働とプラットフォーム層はWeb3とロボット・AIの融合において最も価値のある方向です。ロボットが徐々に知覚、言語、学習能力を獲得するにつれ、自律的に意思決定し、協働し、経済的価値を創造する知的個体へと進化しています。「知的労働者」が真に経済システムに参加するためには、アイデンティティ、信頼、インセンティブ、ガバナンスという4つの核心的ハードルを乗り越える必要があります。
-
アイデンティティ層では、マシンは所有権確立可能で追跡可能なデジタルアイデンティティを持つ必要があります。Machine DIDを通じ、各ロボット、センサー、ドローンはブロックチェーン上で唯一無二の検証可能な「身分証明書」を生成でき、所有権、行動記録、権限範囲を紐付け、安全なインタラクションと責任の明確化を実現します。
-
信頼層では、「マシン労働」が検証可能、計測可能、価格設定可能であることが鍵となります。スマートコントラクト、オラクル、監査メカニズムに加え、物理作業証明(PoPW)、信頼できる実行環境(TEE)、ゼロ知識証明(ZKP)を活用することで、タスク実行プロセスの真実性と追跡可能性を保証し、マシンの行動に経済会計価値を持たせます。
-
インセンティブ層では、Web3はTokenインセンティブ体系、アカウント抽象化、ステートチャンネルを通じてマシン間の自動決済と価値移転を実現します。ロボットはマイクロペイメントで計算リソースのレンタル、データ共有を完遂でき、ステーキングとペナルティメカニズムでタスク履行を保証できます。スマートコントラクトとオラクルを活用すれば、人間の介入なしに非中央集権型「マシン協働市場」を形成できます。
-
ガバナンス層では、マシンが長期的な自律能力を持つようになると、Web3は透明でプログラム可能なガバナンス枠組みを提供します:DAOでシステムパラメータの共同意思決定を行い、マルチシグネチャと信用メカニズムで安全と秩序を維持します。長期的には、これによりマシン社会が「アルゴリズムガバナンス」段階へと進む――人類が目標と境界を設定し、マシン同士は契約によってインセンティブと均衡を維持します。
Web3とロボット融合の究極的ビジョン:実環境評価ネットワーク――分散型ロボットからなる「現実世界推論エンジン」が、多様で複雑な物理環境で継続的にモデル能力をテスト・ベンチマークする。そしてロボット労働市場――ロボットが全世界で検証可能な現実タスクを実行し、ブロックチェーン上で決済を受け取り、その価値を計算リソースやハードウェアアップグレードに再投入する。
現実的道筋から見ると、具身知能とWeb3の融合はまだ初期探索段階にあり、非中央集権型マシンインテリジェント経済体は多くがナラティブとコミュニティ主導のレベルにとどまっています。現実に実現可能性のある結合方向は、主に以下の3つに現れています:
(1)データクラウドソーシングと所有権確立――Web3はブロックチェーン上でのインセンティブと追跡メカニズムを通じ、貢献者が現実世界のデータをアップロードすることを奨励する;(2)グローバルロングテール参加――クロスボーダーマイクロペイメントと微インセンティブメカニズムがデータ収集と配布コストを効果的に低下させる;(3)金融化と協働イノベーション――DAOモデルはロボットの資産化、収益証券化、マシン間決済メカニズムを推進できます。
全体として、短期的には主にデータ収集とインセンティブ層に集中します。中期的には「ステーブルコイン決済+ロングテールデータ集約」とRaaSの資産化・決済層で突破が期待されます。長期的には、ヒューマノイドロボットが大規模に普及すれば、Web3はマシンの所有権、収益分配、ガバナンスの制度的基盤となり、真の非中央集権型マシン経済を形成する可能性があります。
Web3ロボットエコシステムマップと精選ケース
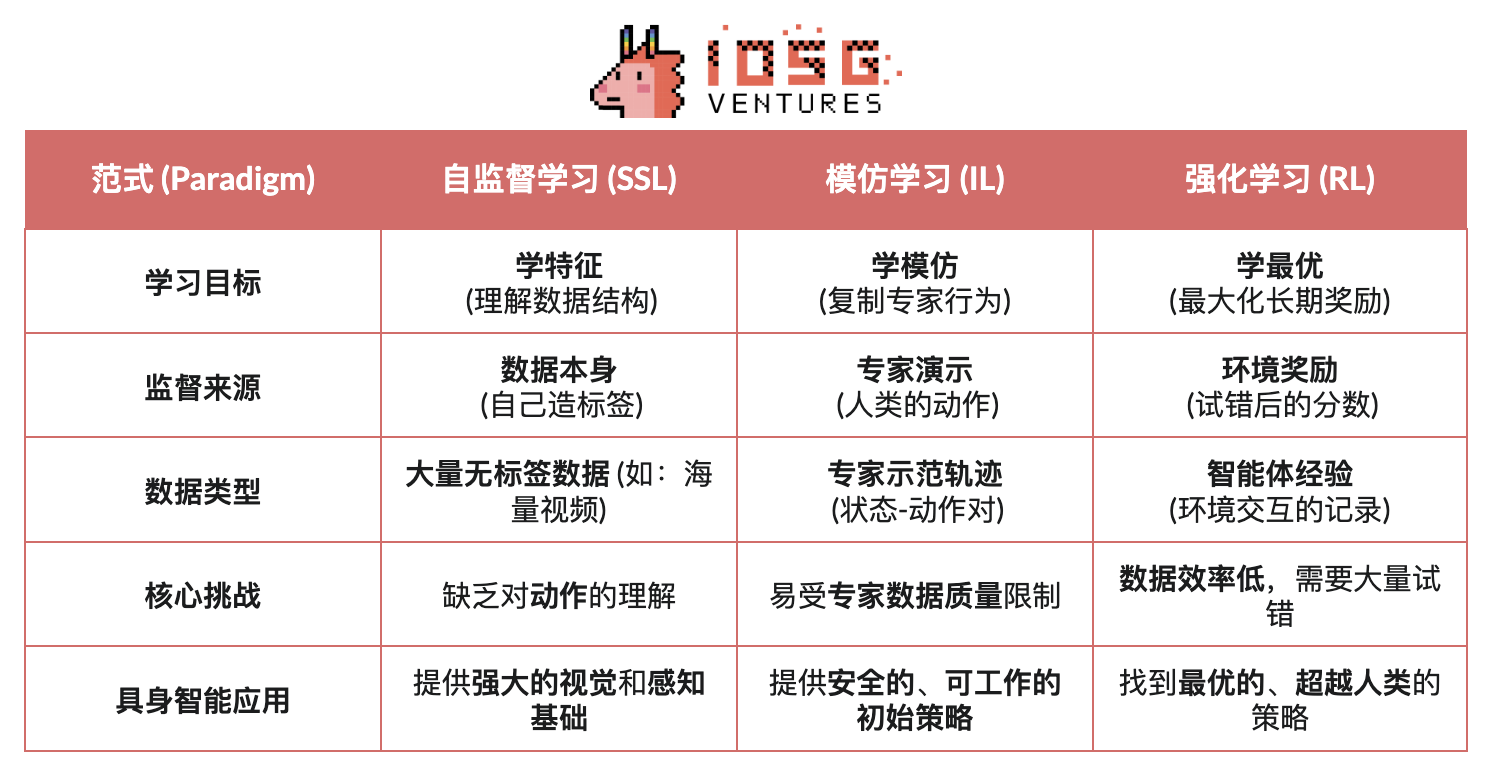
「検証可能な進展、技術公開度、産業関連度」の3つの基準に基づき、現在のWeb3 × Roboticsの代表的プロジェクトを整理し、5層アーキテクチャに分類:モデル知能層、マシン経済層、データ収集層、知覚とシミュレーション基盤層、ロボット資産収益層。客観性を保つため、明らかに「流行に乗った」または情報不足のプロジェクトは除外しています。もし漏れがあれば、ご指摘ください。
モデル知能層(Model & Intelligence)
#Openmind - Building Android for Robots (https://openmind.org/)
OpenMindは具身知能(Embodied AI)とロボット制御を対象とするオープンソースOS(Robot OS)であり、世界初の非中央集権型ロボット実行環境と開発プラットフォームの構築を目指しています。プロジェクトの核心は2つのコンポーネント:
-
OM1:ROS2上に構築されたモジュール型オープンソースAIエージェントランタイム(AI Runtime Layer)。知覚、計画、行動パイプラインを編成し、デジタルおよび実体ロボットにサービスを提供;
-
FABRIC:分散型調整層(Fabric Coordination Layer)。クラウド計算リソース、モデル、現実のロボットを接続し、開発者が統一環境でロボットを制御・訓練できるようにする。
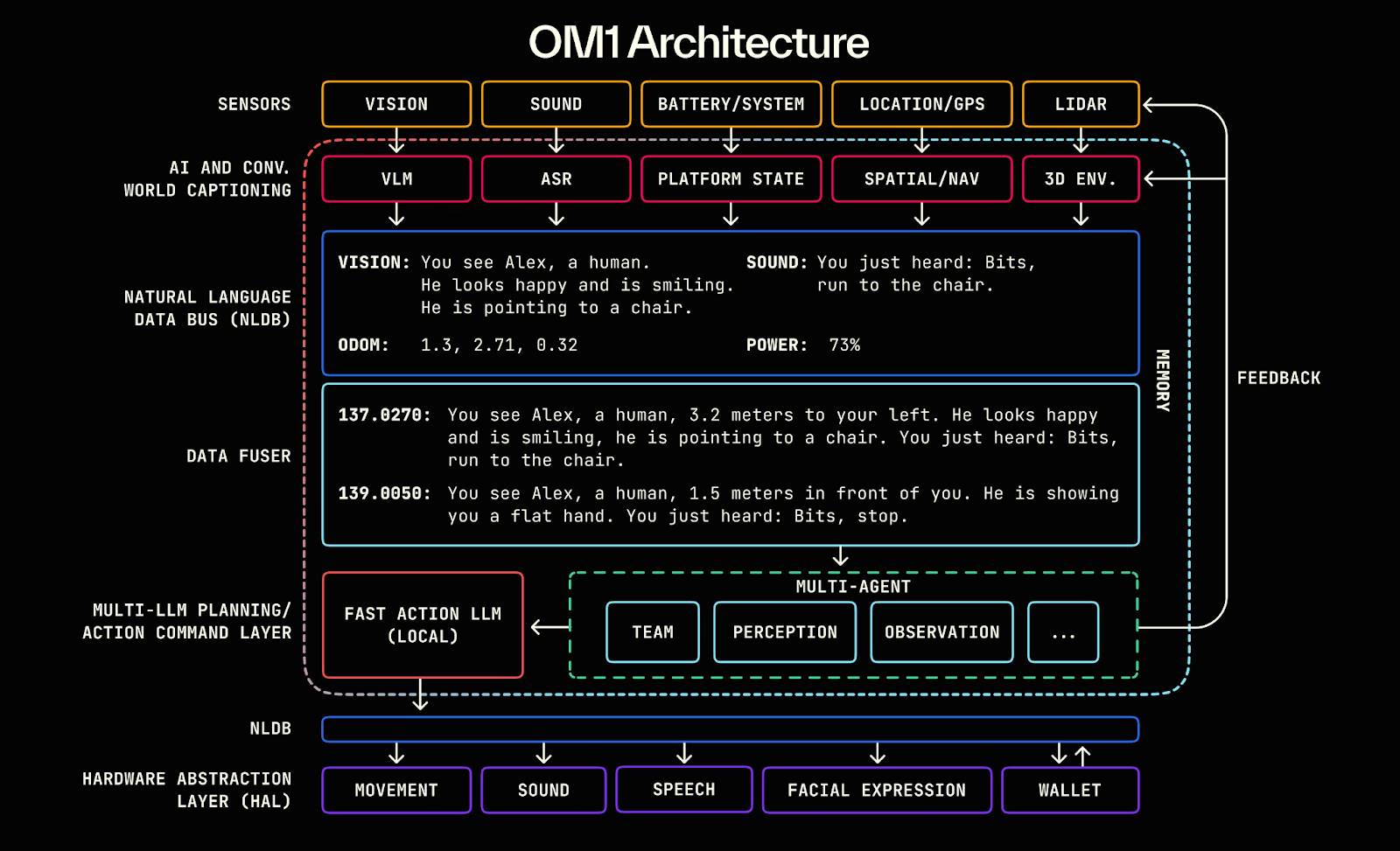
OpenMindの核心は、LLM(大規模言語モデル)とロボット世界の間の知的中間層として機能し、言語知能を真の具身知能(Embodied Intelligence)に変換し、「理解(Language → Action)」から「整合(Blockchain → Rules)」までの知的骨格を構築することです。
OpenMindの多層システムは完全な協働閉ループを実現:人間はOpenMind Appを通じてフィードバックとアノテーション(RLHFデータ)を提供し、Fabric Networkがアイデンティティ検証、タスク割当、決済調整を担当し、OM1 Robotsがタスクを実行し、ブロックチェーン上の「ロボット憲法」に従って行動監査と支払いを完了し、人間フィードバック→タスク協働→ブロックチェーン決済の非中央集権型マシン協働ネットワークを実現します。

プロジェクト進捗と現実評価
OpenMindは「技術的に稼働可能、商業化未達成」という初期段階にあります。コアシステムOM1 RuntimeはGitHubでオープンソース化されており、複数プラットフォームで実行可能で、マルチモーダル入力に対応し、自然言語データバス(NLDB)を通じて言語から行動へのタスク理解を実現しています。独自性は高いものの、まだ実験的で、Fabricネットワークとブロックチェーン決済はインターフェース設計のみ完了しています。
エコシステム面では、Unitree、Ubtech、TurtleBotなどのオープンハードウェアや、Stanford、Oxford、Seoul Roboticsなどの大学と提携しており、主に教育・研究検証に使用されていますが、産業化展開はありません。Appはテスト版がリリースされていますが、インセンティブとタスク機能はまだ初期段階です。
ビジネスモデル面では、OpenMindはOM1(オープンソースシステム)+Fabric(決済プロトコル)+Skill Marketplace(インセンティブ層)の3層エコシステムを構築していますが、現在は収益なしで、約2000万ドルの初期資金(Pantera、Coinbase Ventures、DCG)に依存しています。総じて、技術はリードしていますが、商業化とエコシステムはまだ初期段階です。Fabricが成功裏に展開されれば、「具身知能時代のAndroid」となる可能性がありますが、周期が長く、リスクが高く、ハードウェアへの依存が強いです。
#CodecFlow - The Execution Engine for Robotics (https://codecflow.ai)
CodecFlowはSolanaネットワークに基づく非中央集権型実行層プロトコル(Fabric)であり、AIエージェントとロボットシステムにオンデマンド実行環境を提供し、すべてのエージェントに「即時マシン(Instant Machine)」をもたらすことを目的としています。プロジェクトの核心は3つのモジュール:
-
Fabric:複数クラウド計算リソースを集約する層(Weaver + Shuttle + Gauge)。数秒でAIタスク用の安全な仮想マシン、GPUコンテナ、ロボット制御ノードを生成可能;
-
optr SDK:エージェント実行フレームワーク(Pythonインターフェース)。デスクトップ、シミュレーション、実ロボットを操作可能な「Operator」を作成可能;
-
Tokenインセンティブ:ブロックチェーン上でのインセンティブと支払い層。計算資源提供者、エージェント開発者、自動化タスクユーザーを接続し、非中央集権型計算リソースとタスク市場を形成。
CodecFlowの核心目標は、「AIとロボットオペレーターのための非中央集権型実行基盤」を構築し、任意のエージェントが任意の環境(Windows/Linux/ROS/MuJoCo/ロボットコントローラー)で安全に実行可能にし、計算リソーススケジューリング(Fabric)→システム環境(System Layer)→知覚と行動(VLA Operator)の汎用実行アーキテクチャを実現することです。
プロジェクト進捗と現実評価
Fabricフレームワーク(Go)とoptr SDK(Python)の初期バージョンをリリース済みで、ウェブページまたはコマンドライン環境で隔離された計算インスタンスを起動可能です。Operatorマーケットは2025年末のリリース予定で、AI計算リソースの非中央集権型実行層を位置づけ、主な対象はAI開発者、ロボット研究チーム、自動化運営企業です。

マシン経済層(Machine Economy Layer)
#BitRobot - The World’s Open Robotics Lab (https://bitrobot.ai)
BitRobotは具身知能(Embodied AI)とロボット研究開発を対象とする非中央集権型科学研究・協働ネットワーク(Open Robotics Lab)であり、FrodoBots LabsとProtocol Labsが共同で立ち上げました。その核心ビジョンは、「サブネット(Subnets)+インセンティブメカニズム+検証可能作業(VRW)」のオープンアーキテクチャを通じて、以下の主要機能を実現することです:
-
VRW(Verifiable Robotic Work)標準により、各ロボットタスクの実際の貢献を定義・検証;
-
ENT(Embodied Node Token)により、ロボットにブロックチェーン上でのアイデンティティと経済的責任を付与;
-
Subnetsにより、研究、計算リソース、機器、オペレーターの地理的制約を超えた協働を組織;
-
Senate+Gandalf AIにより、「人間とマシンの共同ガバナンス」によるインセンティブ意思決定と研究ガバナンスを実現。
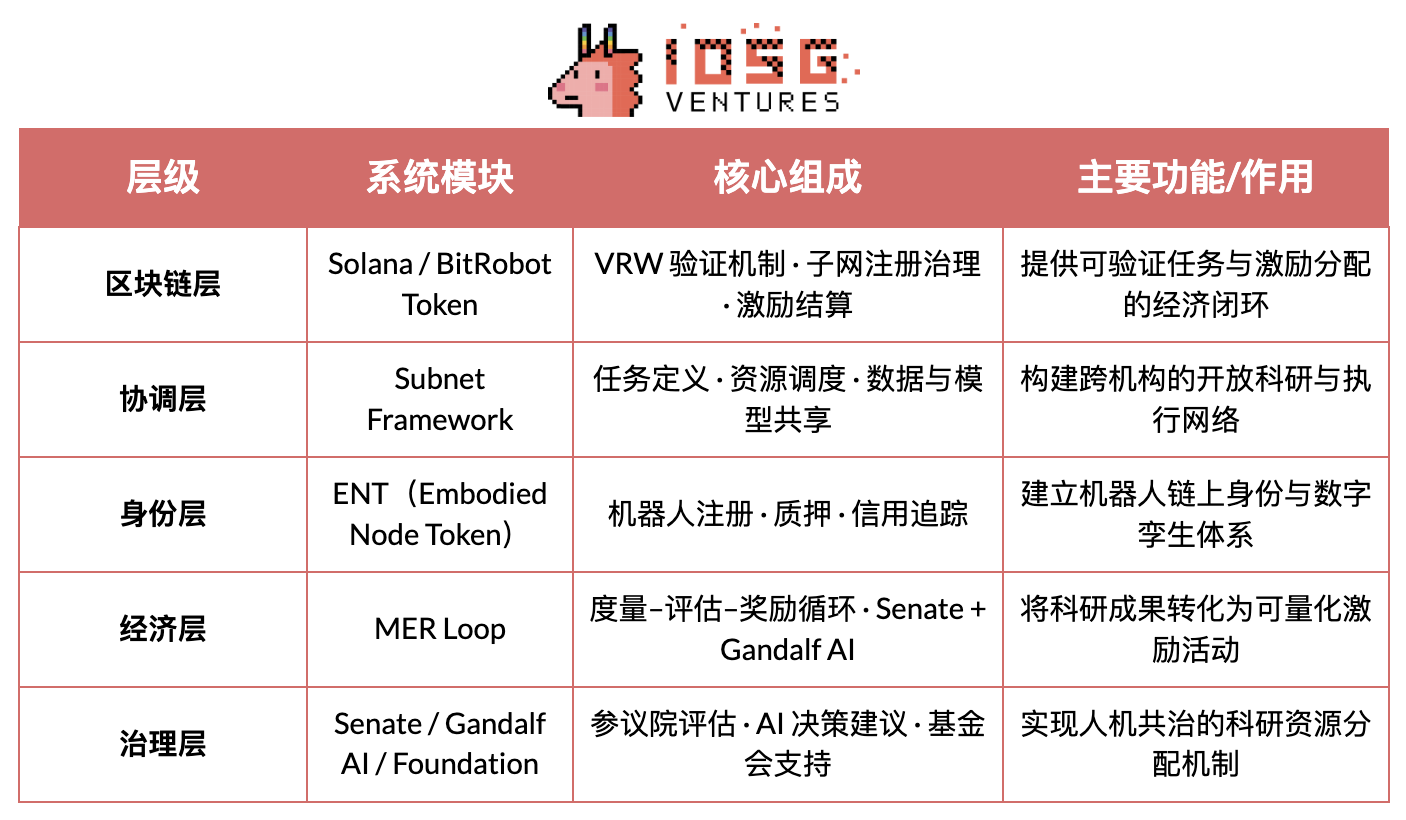
2025年にホワイトペーパーを発表して以来、BitRobotは複数のサブネット(例:SN/01 ET Fugi、SN/05 SeeSaw by Virtuals Protocol)を運用し、非中央集権型遠隔操作と実環境データ収集を実現し、「$5M Grand Challenges」基金を設立してグローバルなモデル開発研究コンペティションを推進しています。
#peaq – The Economy of Things (https://www.peaq.network)
peaqはマシン経済専用のLayer-1ブロックチェーンであり、数百万台のロボットと機器にマシンアイデンティティ、ブロックチェーンウォレット、アクセス制御、ナノ秒級時間同期(Universal Machine Time)などの基盤機能を提供します。そのロボティクスSDKにより、開発者はわずかなコードでロボットを「マシン経済対応」にでき、他社間・他システム間の相互運用性とインタラクションを実現します。
現在、peaqは世界初のトークン化ロボット農場をローンチしており、60以上の実世界マシンアプリケーションをサポートしています。そのトークン化フレームワークは、資本集約型ハードウェアを持つロボット企業が資金を調達できるようにし、参加方法を従来のB2B/B2Cからより広範なコミュニティ層へと拡大します。ネットワーク手数料から注入されるプロトコルレベルのインセンティブプールにより、peaqは新規デバイスの接続を補助し、開発者を支援することで、ロボットと物理AIプロジェクトの加速的拡大を促す経済的飛行機関を形成しています。

データ収集層 (Data Layer)
具身知能訓練における希少かつ高価な高品質現実世界データの問題を解決することを目指しています。遠隔操作(PrismaX, BitRobot Network)、第一人称視点とモーションキャプチャ(Mecka、BitRobot Network、Sapien、Vader、NRN)、シミュレーションと合成データ(BitRobot Network)など、複数のアプローチで人間とロボットのインタラクションデータを収集・生成し、ロボットモデルに拡張可能で汎用性のある訓練基盤を提供します。
明確にしておくべきことは、Web3は「データ生産」に長けていません――ハードウェア、アルゴリズム、収集効率の面では、Web2の巨大企業はいかなるDePINプロジェクトよりもはるかに優れています。その真の価値はデータの分配とインセンティブメカニズムの再設計にあります。『ステーブルコイン決済ネットワーク+クラウドソーシングモデル』に基づき、許可不要のインセンティブ体系とブロックチェーン上所有権確立メカニズムを通じて、低コストのマイクロ決済、貢献追跡、自動収益分配を実現します。しかし、オープンクラウドソーシングは依然として品質と需要の閉ループ問題に直面しています――データ品質がばらつき、有効な検証と安定した買い手が不足しています。
#PrismaX (https://gateway.prismax.ai)
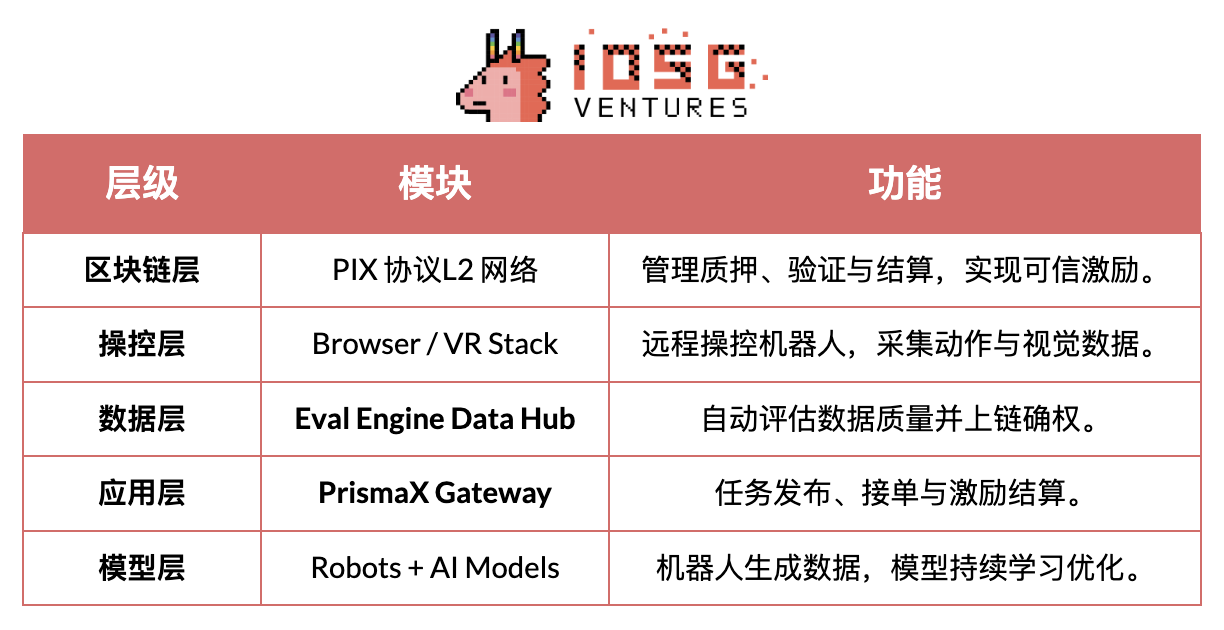
PrismaXは具身知能(Embodied AI)向けの非中央集権型遠隔操作とデータ経済ネットワークであり、「グローバルロボット労働市場」の構築を目指し、人間オペレーター、ロボット機器、AIモデルがブロックチェーン上インセンティブシステムを通じて協同進化することを可能にします。プロジェクトの核心は2つのコンポーネント:
-
Teleoperation Stack――遠隔操作システム(ブラウザ/VRインターフェース+SDK)。世界中のマニピュレーターやサービスロボットを接続し、人間によるリアルタイム操作とデータ収集を実現;
-
Eval Engine――データ評価・検証エンジン(CLIP+DINOv2+光流セマンティックスコア)。各操作軌跡に対して品質スコアを生成し、ブロックチェーン上で決済。
PrismaXは非中央集権型インセンティブメカニズムを通じ、人間の操作行動を機械学習データに変換し、「遠隔操作→データ収集→モデル訓練→ブロックチェーン決済」という完全閉ループを構築し、「人間労働=データ資産」とする循環経済を実現します。
プロジェクト進捗と現実評価
PrismaXは2025年8月にテスト版をリリース(gateway.prismax.ai)し、ユーザーが遠隔操作でマニピュレーターを制御して把持実験を行い、訓練データを生成できるようになりました。Eval Engineは内部で稼働中です。全体的に見て、PrismaXは技術的実現度が高く、位置づけが明確で、「人間操作×AIモデル×ブロックチェーン決済」をつなぐキーミドルレイヤーです。長期的なポテンシャルは「具身知能時代の非中央集権型労働・データプロトコル」となる可能性がありますが、短期的には規模拡大の課題に直面しています。
#BitRobot Network(https://bitrobot.ai/)
BitRobot Networkはそのサブネットを通じて、映像、遠隔操作、シミュレーションなど多源データ収集を実現しています。SN/01 ET Fugiでは、ユーザーがロボットを遠隔操作してタスクを完了し、「現実版ポケモンGO方式」のインタラクションでナビゲーションと知覚データを収集します。この遊び心あるアプローチにより、FrodoBots-2Kデータセットが誕生し、現在最大規模の人間-ロボットナビゲーションオープンソースデータセットの一つとなっており、UC Berkeley RAILやGoogle DeepMindなどの機関で利用されています。SN/05 SeeSaw(Virtual Protocol)はiPhoneを用いて実環境で大規模に第一人称視点映像データをクラウドソーシングで収集します。他の公表されたサブネット、RoboCapやRayvoは、低コスト実機装置を用いた第一人称視点映像データ収集に特化しています。
#Mecka (https://www.mecka.ai)
Meckaはロボットデータ企業であり、ゲーム化されたスマホ収集とカスタムハードウェア装置を通じ、第一人称視点映像、人体運動データ、タスクデモンストレーションをクラウドソーシングで収集し、大規模マルチモーダルデータセットを構築して具身知能モデルの訓練を支援します。
#Sapien (https://www.sapien.io/)
Sapienは「人体運動データがロボット知能を駆動する」ことを核とするクラウドソーシングプラットフォームであり、ウェアラブルデバイスとモバイルアプリを通じて人体の動き、姿勢、インタラクションデータを収集し、具身知能モデルの訓練に使用します。世界最大の人体運動データネットワークの構築を目指し、人間の自然な行動をロボット学習と汎化の基盤データ源とすることを志しています。
#Vader(https://www.vaderai.ai)
Vaderは現実世界MMOアプリEgoPlayを通じて第一
TechFlow公式コミュニティへようこそ
Telegram購読グループ:https://t.me/TechFlowDaily
Twitter公式アカウント:https://x.com/TechFlowPost
Twitter英語アカウント:https://x.com/BlockFlow_News














