

新たなコンセプトの創造か?DeSPINを理解し、注目すべき8つのプロジェクト
TechFlow厳選深潮セレクト
新たなコンセプトの創造か?DeSPINを理解し、注目すべき8つのプロジェクト
DeSPINの核となるのは、地理情報と環境コンテキストを統合し、人間の意思決定を支援することである。
著者:cookies
翻訳:TechFlow
Web3技術の進化に伴い、分散型空間知能ネットワーク(Decentralized Spatial Intelligence Network, DeSPIN)は注目を集める分野となりつつある。現実世界の視覚データを分析・活用することで、DeSPINは地図作成や都市計画、ロボット工学に革新をもたらすだけでなく、「貢献して報酬を得る」(Contribute-to-Earn)という新たな経済モデルを開拓している。本稿では、DeSPINの基本概念、主要プロトコル、そして将来の展望について詳しく解説する。

DeSPINとは何か?
空間知能(Spatial Intelligence)とは、現実世界の視覚データを分析し、そこから洞察を抽出する技術である。その核となるのは地理情報と環境コンテキストの統合であり、人間の意思決定を支援することにある。一方、分散型空間知能ネットワーク(DeSPIN)は、この技術にブロックチェーンおよびWeb3の分散化理念を融合させた、オープンで共有可能なエコシステムである。例えば、日常的に撮影した道路の写真や、ショッピングモールや街中で記録した環境データを提供することで報酬が得られると想像してみよう。このようなモデルはデータ収集のハードルを下げると同時に、一般ユーザーが空間知能の発展に貢献するインセンティブを生み出す。
DeSPINの具体的な応用を理解する前に、まず空間知能の基礎構造を把握しておく必要がある。空間知能は以下の4つの要素から構成される。
-
データ収集:カメラやGPSなどのセンサーネットワーク、スマートフォンやノートPCなどのIoTデバイスを用いてデータを取得する。
-
データ処理と分析:機械学習技術を活用して地理メタデータを処理し、パターンを識別し、空間クエリデータベースを構築する。
-
知識表現:セマンティックマッピングによりデータと環境コンテキストを関連付け、ユーザーに視覚的な地理情報を提供する。
-
意思決定支援システム:空間予測モデルを構築し、ルート最適化や障害物回避など、ユーザー向けのアプリケーションサービスを提供する。
DeSPIN分野の主要プロトコル
現在、DeSPIN分野にはさまざまなユースケースに特化した革新的なプロトコルが登場している。以下に注目すべき8つのプロジェクトを紹介する。
1. Hivemapper
Hivemapperは「ドライブして報酬を得る」(Drive-2-Earn)モデルを採用する、分散型地図作成プロトコルである。ユーザーはモバイルアプリを通じてリアルタイムで道路の問題を報告し、運転手は車両に搭載されたドライブレコーダーでデータを収集する。AIアルゴリズムがこれらのデータを処理して地図を生成し、人間によるフィードバック強化学習(RLHF)によって正確性が検証される。Hivemapperはカバレッジマップを提供しており、どの地域がすでにマッピングされたかを確認でき、APIを通じてデータにアクセス可能だ。データ提供者は$HONEYトークンを受け取り、これを地図データや他のサービスの購入に利用できる。
2. NATIX Network
NATIX Networkはモバイル端末やドライブレコーダーを活用して道路データを収集する分散型マップエコノミープロトコルであり、「ドライブして報酬を得る」モデルを採用している。そのコア技術VX360は360度パノラマデータ収集を可能にし、収集されたデータは自動運転の最適化など運転支援機能の開発に利用される。現在、NATIX Networkは171か国をカバーし、登録ドライバーは22.3万人を超え、累計マッピング距離は1.31億キロメートルに達している。データ提供者やネットワークノードはいずれも$NATIXトークンの報酬を受け取り、エコシステムの発展を促進している。
HivemapperとNATIXはともに、クラウドソーシングによる道路データを活用して高品質な地図を構築することを目指している。これらのデータは以下のような幅広い用途に応用可能である。
-
都市交通の最適化:リアルタイムで収集された道路データを分析することで、交通量管理を改善し、渋滞を緩和し、移動効率を向上できる。
-
道路状態の監視:道路の損傷や障害物、その他の潜在的リスクを早期に発見・報告することで、インフラの安全性と信頼性を維持する支援が可能になる。
-
犯罪および暴力行為の検知:地図データとAIアルゴリズムを組み合わせることで、異常行動を識別・特定し、公共安全の強化に貢献できる。
これらの応用は地図の機能性を高めるだけでなく、都市管理や社会安全にも実際的な価値をもたらしている。
3. FrodoBots
FrodoBotsは、ロボットを用いたゲーム化されたデータ収集プロトコルであり、ユーザーは地上ロボットを遠隔操作して地理データを収集できる。コントローラーやキーボード、ゲーム用ステアリングホイールなど複数の操作方法に対応している。また、研究者はプラットフォーム上でAIナビゲーションモデルのテストを行うことも可能だ。ユーザーは走行タスクの達成によりFrodoBotポイント(FBPs)を獲得し、ポイントは走行距離や難易度に応じて変動する。より長い距離、高い難易度ほど多くのポイントが得られる。FrodoBotsは複数の都市でテストを実施しており、AIと人間のナビゲーション能力を競わせるコンテストも開催している。さらに、「ギルド」のような仕組みであるEarth Rovers Schoolを設立し、新規ユーザーがEarth Roversをレンタルしてデータ収集に参加できるようにしている。
4. JoJoWorld
JoJoWorldは3D空間データの収集に特化したプロトコルであり、ユーザーが提供したデータを活用して3Dモデルのトレーニングを行う。プラットフォームはバーチャルリアリティや都市計画などに活用可能な高品質な3Dデータを提供する。ユーザーはこれらの3Dデータを直接購入し、個別のデジタルモデル開発に使用することも可能だ。
以降の4つのプロトコルも現実世界の空間データ収集を目的としているが、ロボットモデルのトレーニングといったより専門的な領域に焦点を当てている。これらはニッチなデータや特定のニーズに着目することで、DeSPINエコシステムにさらなる可能性をもたらしている。
5. PrismaXAI
PrismaXAIは第一人称視点(Egocentric View)による特定シナリオのデータ収集を行うプロトコルであり、手と物体の相互作用、動的動作、社交イベントなどの複雑なシーンに適している。そのコア技術であるProof-of-Viewによりデータの真正性が保証され、分散型検証メカニズムによってデータアノテーションの精度も向上する。このプロトコルはロングテールデータの収集において大きなポテンシャルを持ち、モデルトレーニングに独自の優位性を提供する。
6. OpenMind AGI
OpenMind AGIは、視覚・言語・行動モデル(VLAMs)を通じて現実世界を理解することを目指す。そのコアシステムOM1はマルチプラットフォーム対応のOSであり、動的な現実環境と相互作用することが可能で、特にロボット技術のカスタマイズ開発に適している。スマートフォンやロボットを通じてデータを収集し、それをロボット開発者と共有することで、ロボットアプリケーションの改善と革新を支援している。
7. MeckaAI
MeckaAIは分散型ロボットAIモデルトレーニングプロトコルであり、ユーザーがアップロードした動画データを活用してロボットの行動モデルをトレーニングする。プラットフォームはモバイルアプリを提供しており、ユーザーはタスクの完了によりOG Meckaポイントを獲得し、データ提供へのインセンティブを強化している。MeckaAIはクラウドソーシングを通じてロボット技術の発展を推進し、トレーニングデータの入手ハードルを下げることを目指している。
8. Xmaquina DAO
Xmaquina DAOは、オープンソースのロボットプロジェクトを支援する分散型自治組織(DAO)である。他のプロトコルのように直接モデルのトレーニングに関与するのではなく、Xmaquina DAOの主な目的はリソース配分を通じてロボット分野の研究とイノベーションを支援することにある。内部のイノベーションセンター「Deus Lab」はロボット技術の研究開発に注力しており、MachineDAOは$DEUSトークンのステーキングによって各プロジェクトへのリソース配分を投票決定する。この仕組みはロボット技術のオープンソース開発に資金面での支援を提供すると同時に、リソース配分の透明性と公平性を確保している。
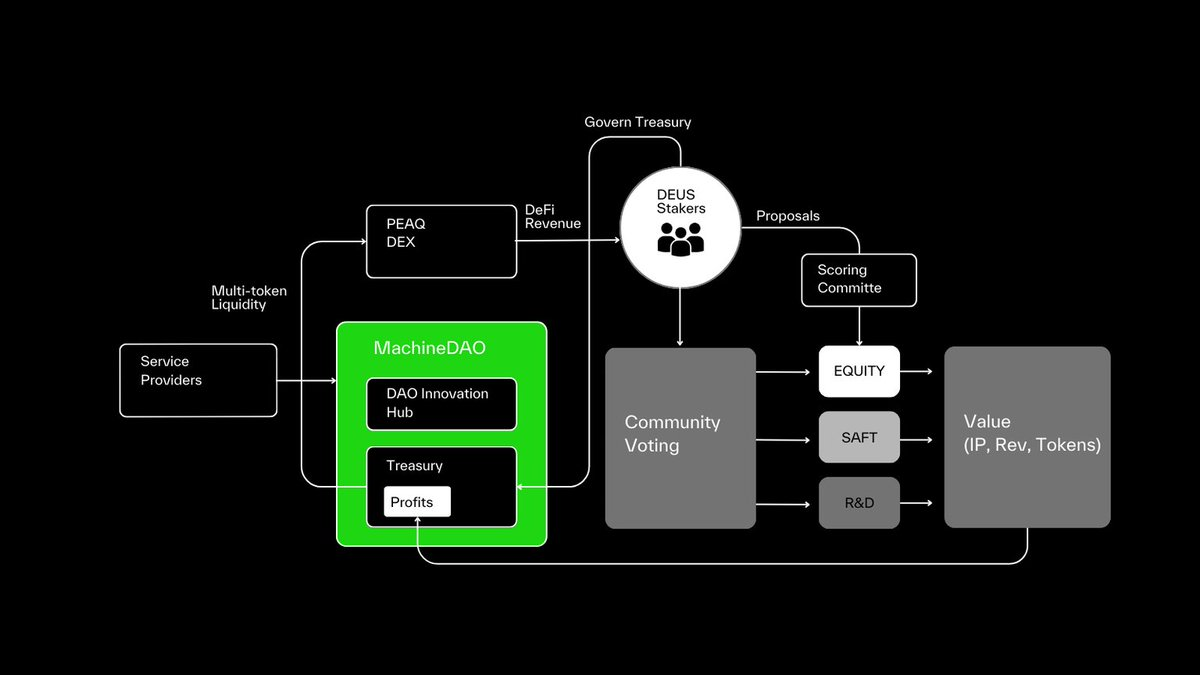
MachineDAOの組織構造
紙面の都合上、ここでは詳細に述べていないが、同様に注目すべきプロトコルとしてAlaya_AI、Gata_xyz、KrangHQなどがある。
DeSPINの未来:貢献から価値へ
DeSPINはまだ初期段階にあるが、その潜在能力は無視できない。物理AIや具身AI(Embodied AI)の進展、そして「ヒューマンデータ艦隊」(Human Data Fleet)といった新概念の台頭に伴い、DeSPINは新たな技術革命を牽引する可能性を秘めている。
今後予想されるトレンドの一つは、「トレーニングして報酬を得る」(Train-to-Earn, T2E)モデルの普及である。ユーザーは日常生活の中で取得した空間データを提供することで価値を創出し、データの質に応じて報酬を受け取ることができる。例えば、分散型スマートグラスの登場は、データ収集の精度と多様性を飛躍的に高めるだろう。スマートグラスが捉えるデータは、人間が世界を認識する方法を最も忠実に反映するだけでなく、環境ノイズや顔の特徴といったロングテールデータも多く含み、空間知能分野にさらに広範な可能性をもたらす。
しかし、DeSPINの発展には以下のような課題も存在する。
-
データ検証:クラウドソースされたデータの真正性と正確性をどう保証するか?
-
倫理的課題:データの使用をどのように規制し、プライバシーの漏洩や悪用を防ぐか?
-
需要側の受容性:伝統的な機関は、分散型のデータセットを採用する用意があるのか?
これらの課題の解決が、DeSPINの将来を左右する。今後の研究と対応が求められている。
TechFlow公式コミュニティへようこそ
Telegram購読グループ:https://t.me/TechFlowDaily
Twitter公式アカウント:https://x.com/TechFlowPost
Twitter英語アカウント:https://x.com/BlockFlow_News














