Đêm trước thị trường 5 nghìn tỷ: Cơ hội đầu tư ở đâu cho trí tuệ nhân tạo thân thể × Web3?
Tuyển chọn TechFlowTuyển chọn TechFlow
Đêm trước thị trường 5 nghìn tỷ: Cơ hội đầu tư ở đâu cho trí tuệ nhân tạo thân thể × Web3?
Trí tuệ thân thể x Web3, các giải pháp định hướng cấu trúc thúc đẩy cơ hội đầu tư.
Tác giả:merakiki
Biên dịch: TechFlow
Suốt nhiều thập kỷ, công nghệ robot bị giới hạn trong các tác vụ lặp đi lặp lại tại môi trường nhà máy có cấu trúc. Tuy nhiên, trí tuệ nhân tạo (AI) ngày nay đang cách mạng hóa lĩnh vực robot, cho phép chúng hiểu và thực hiện chỉ thị người dùng, đồng thời thích nghi với môi trường thay đổi động.
Chúng ta đang bước vào một kỷ nguyên tăng trưởng nhanh chóng mới. Theo dự báo của Citibank, đến năm 2035 sẽ có 1,3 tỷ robot được triển khai trên toàn cầu, ứng dụng từ nhà máy mở rộng sang gia đình và ngành dịch vụ. Đồng thời, Morgan Stanley dự đoán riêng thị trường robot hình người có thể đạt quy mô 5 nghìn tỷ USD vào năm 2050.
Mặc dù sự mở rộng này giải phóng tiềm năng thị trường khổng lồ, nó cũng đi kèm những thách thức lớn về tập trung hóa, niềm tin, quyền riêng tư và khả năng mở rộng. Trong khi đó, công nghệ Web3 cung cấp giải pháp đột phá để giải quyết các vấn đề này thông qua việc hỗ trợ mạng lưới robot phi tập trung, xác minh được, bảo vệ quyền riêng tư và hợp tác.
Trong bài viết này, chúng tôi sẽ đi sâu vào chuỗi giá trị robot AI đang phát triển, đặc biệt tập trung vào lĩnh vực robot hình người, đồng thời khám phá những cơ hội hấp dẫn từ sự kết hợp giữa robot AI và công nghệ Web3.
Chuỗi giá trị robot AI
Chuỗi giá trị robot AI gồm bốn lớp cơ bản: phần cứng, trí tuệ, dữ liệu và đại lý. Mỗi lớp xây dựng trên các lớp khác, cho phép robot cảm nhận, suy luận và hành động trong các môi trường thực tế phức tạp.
Gần đây, dưới sự dẫn dắt của các tiên phong như Unitree và Figure AI, lớp phần cứng đã đạt được tiến bộ đáng kể. Tuy nhiên, ở các lớp phi phần cứng vẫn còn nhiều thách thức then chốt, đặc biệt là sự khan hiếm bộ dữ liệu chất lượng cao, thiếu mô hình nền tảng phổ quát, tính tương thích kém giữa các thiết bị và nhu cầu về điện toán biên đáng tin cậy. Do đó, cơ hội phát triển lớn nhất hiện nay nằm ở lớp trí tuệ, lớp dữ liệu và lớp đại lý.
1.1 Lớp phần cứng: "Thân thể"
Ngày nay, việc sản xuất và triển khai "thân thể robot" hiện đại dễ dàng hơn bao giờ hết. Hiện tại, thị trường đã có hơn 100 loại robot hình người khác nhau, bao gồm Optimus của Tesla, G1 của Unitree, Digit của Agility Robotics và Figure 02 của Figure AI.
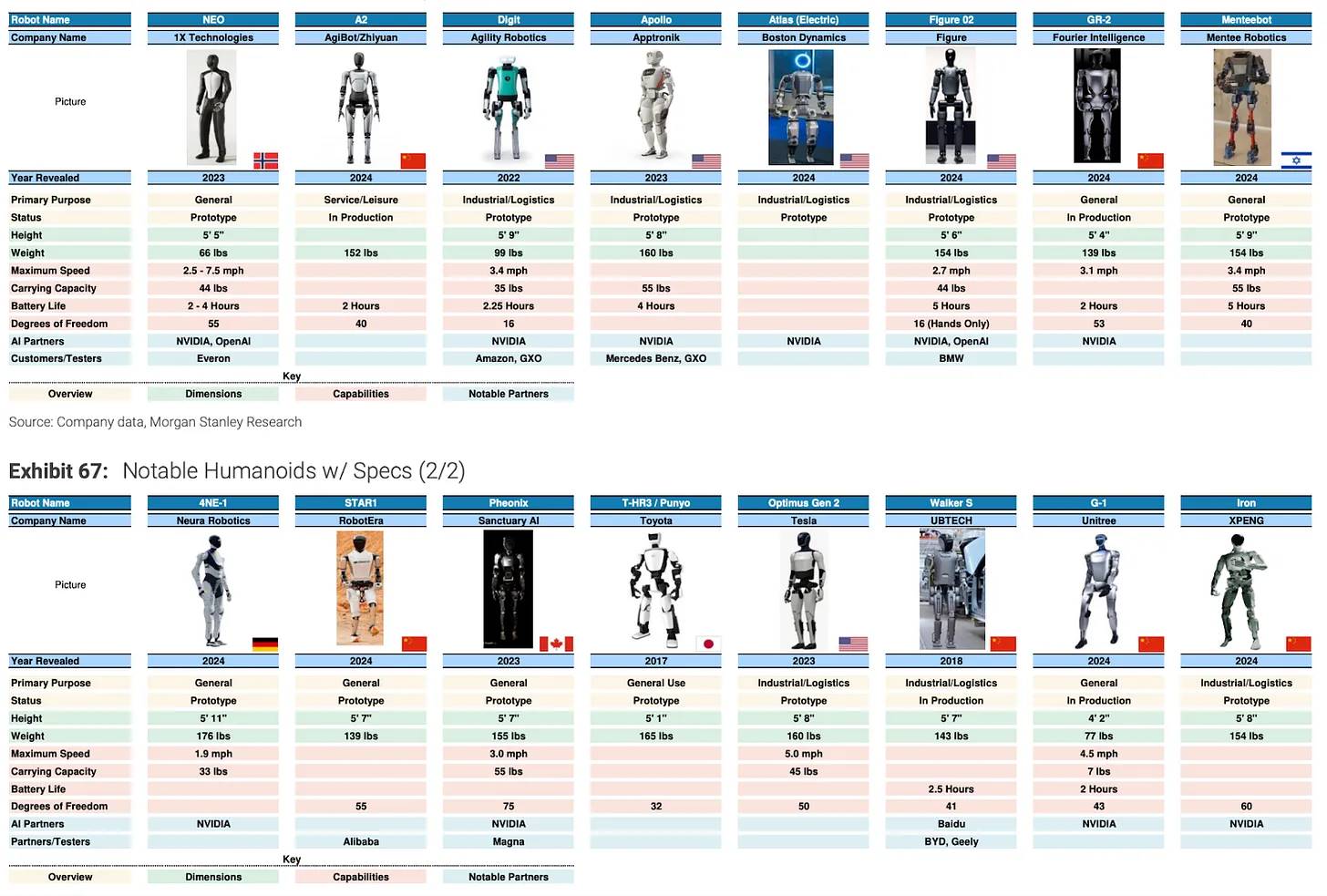
Nguồn:Morgan Stanley, "Humanoid 100: Bản đồ chuỗi giá trị robot hình người"
Tiến bộ này nhờ vào ba thành phần công nghệ then chốt sau:
-
Bộ truyền động (Actuators): Đóng vai trò như "bắp thịt" của robot, bộ truyền động chuyển đổi lệnh kỹ thuật số thành chuyển động chính xác. Những đổi mới về động cơ hiệu suất cao giúp robot thực hiện các hành động nhanh và chính xác, trong khi bộ truyền động đàn hồi điện môi (Dielectric Elastomer Actuators, DEAs) phù hợp với các nhiệm vụ tinh vi. Các công nghệ này nâng cao đáng kể tính linh hoạt của robot, ví dụ như Optimus Gen 2 của Tesla có 22 bậc tự do (DoF), cùng với Unitree G1, đều thể hiện độ linh hoạt gần giống con người và khả năng di chuyển ấn tượng.
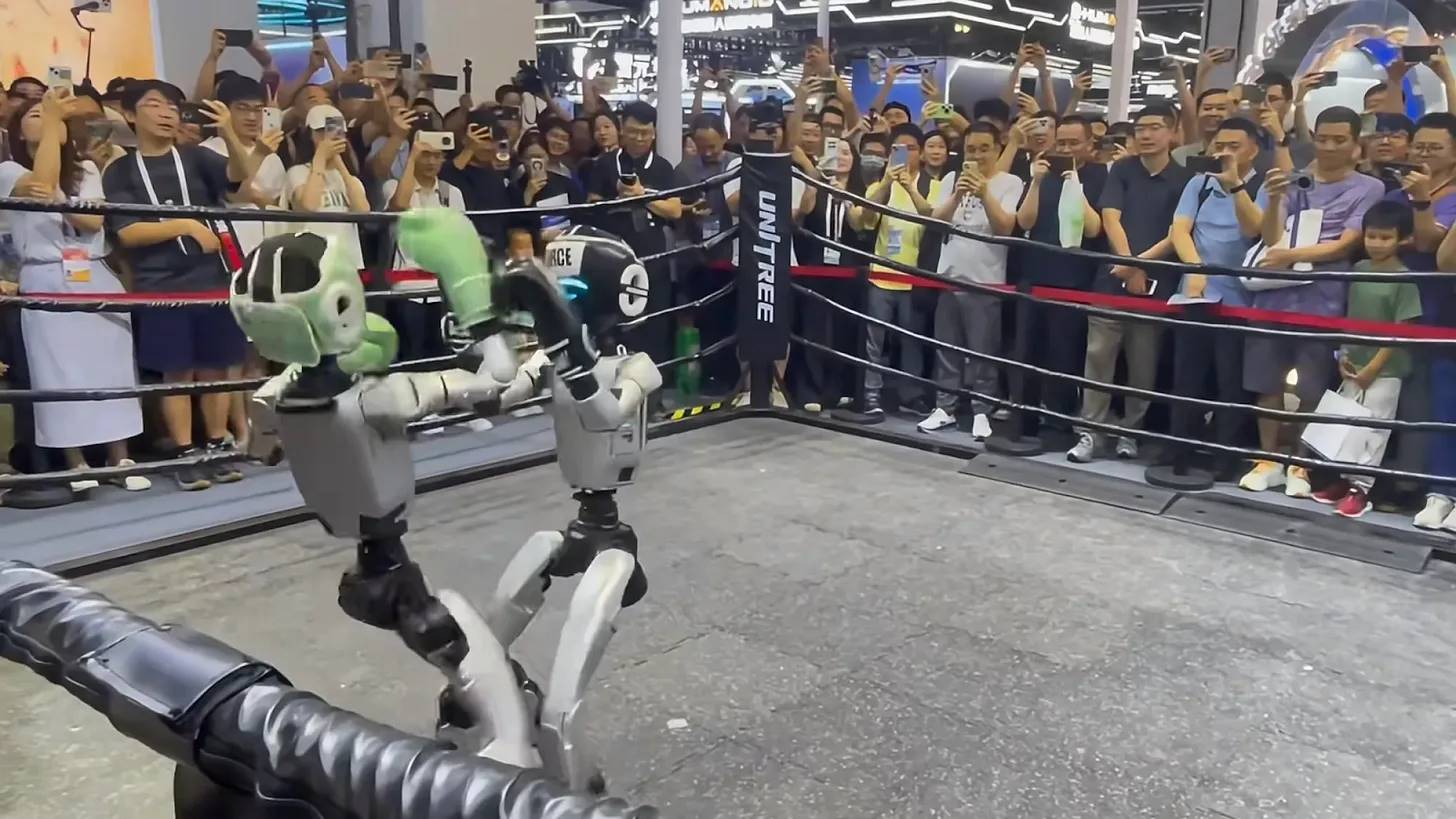
Nguồn: Unitree biểu diễn robot hình người mới nhất thi đấu quyền anh tại Hội nghị Thế giới Trí tuệ Nhân tạo WAIC 2025
-
Cảm biến (Sensors): Cảm biến tiên tiến giúp robot cảm nhận và diễn giải môi trường thông qua hình ảnh, LIDAR/RADAR, xúc giác và đầu vào âm thanh. Các công nghệ này hỗ trợ điều hướng an toàn, thao tác chính xác và nhận thức ngữ cảnh.
-
Điện toán nhúng (Embedded Computing): CPU, GPU và bộ gia tốc AI (như TPU và NPU) trên thiết bị xử lý dữ liệu cảm biến theo thời gian thực và chạy các mô hình AI, cho phép ra quyết định độc lập. Kết nối đáng tin cậy với độ trễ thấp đảm bảo phối hợp liền mạch, trong khi kiến trúc lai giữa biên và đám mây cho phép robot dời tải các tác vụ tính toán nặng khi cần.
1.2 Lớp trí tuệ: "Bộ não"
Khi phần cứng ngày càng trưởng thành, trọng tâm ngành chuyển sang xây dựng "bộ não robot": các mô hình nền tảng mạnh mẽ và các chiến lược điều khiển tiên tiến.
Trước khi tích hợp AI, robot phụ thuộc vào tự động hóa dựa trên quy tắc, thực hiện các hành động được lập trình sẵn mà không có trí tuệ thích nghi.
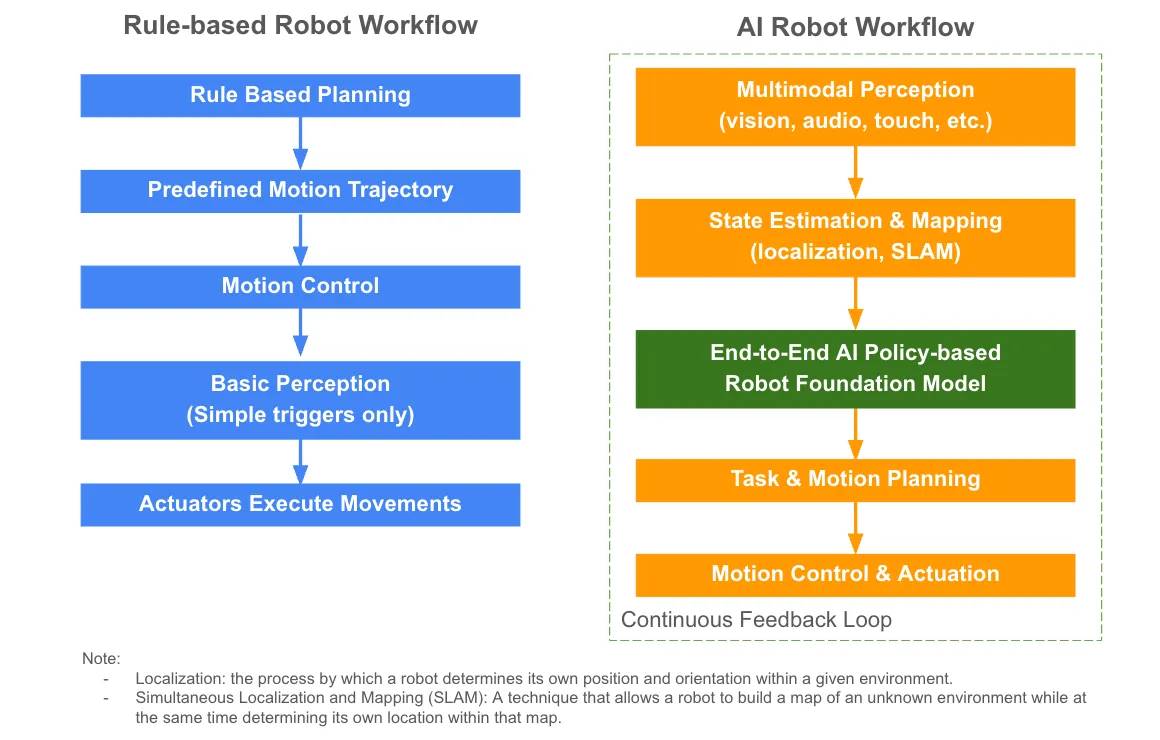
Các mô hình nền tảng đang dần được áp dụng trong lĩnh vực robot. Tuy nhiên, chỉ riêng các mô hình ngôn ngữ lớn (LLMs) phổ quát là chưa đủ, vì robot cần cảm nhận, suy luận và hành động trong môi trường vật lý động. Để đáp ứng nhu cầu này, ngành đang phát triển các mô hình nền tảng robot đầu cuối dựa trên chiến lược. Các mô hình này cho phép robot:
-
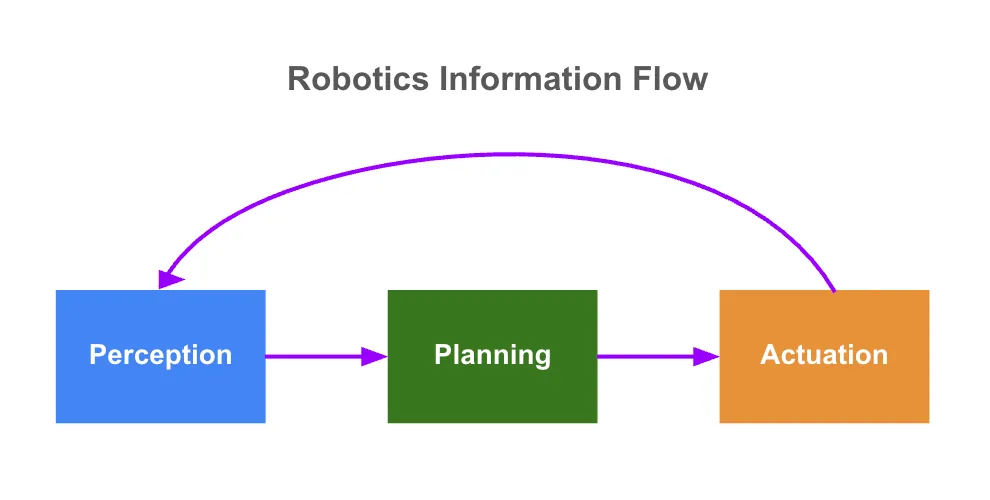
Cảm nhận (Perceive): Nhận dữ liệu cảm biến đa phương thức (hình ảnh, âm thanh, xúc giác)
-
Lập kế hoạch (Plan): Ước tính trạng thái bản thân, lập bản đồ môi trường và diễn giải chỉ thị phức tạp, ánh xạ trực tiếp cảm nhận thành hành động, giảm thiểu can thiệp kỹ thuật thủ công
-
Hành động (Act): Tạo kế hoạch vận động và đưa ra lệnh điều khiển để thực thi theo thời gian thực
Các mô hình này học các "chiến lược" tổng quát để tương tác với thế giới, cho phép robot thích nghi với nhiều nhiệm vụ và hoạt động với mức độ thông minh và tự chủ cao hơn. Các mô hình cao cấp còn sử dụng phản hồi liên tục, giúp robot học hỏi từ kinh nghiệm, từ đó tăng cường thêm khả năng thích nghi trong môi trường động.
Các mô hình VLA ánh xạ trực tiếp đầu vào cảm giác (chủ yếu là dữ liệu hình ảnh và chỉ thị ngôn ngữ tự nhiên) thành hành động robot, cho phép robot phát ra lệnh điều khiển phù hợp dựa trên những gì chúng "nhìn thấy" và "nghe thấy". Một số ví dụ đáng chú ý bao gồm RT-2 của Google, Isaac GR00T N1 của NVIDIA và π0 của Physical Intelligence.
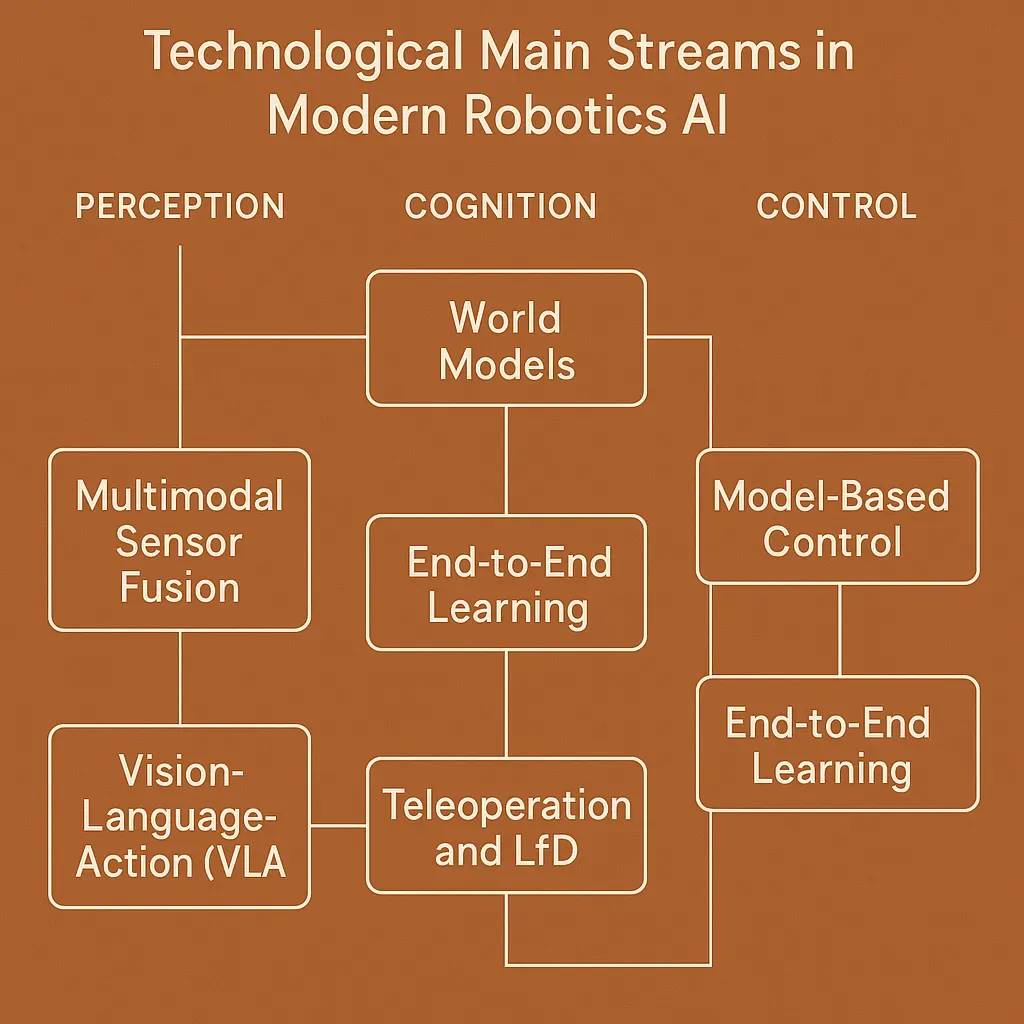
Để tăng cường các mô hình này, thường tích hợp nhiều phương pháp bổ trợ, ví dụ:
-
Mô hình thế giới (World Models): Xây dựng mô phỏng nội bộ về môi trường vật lý, giúp robot học hành vi phức tạp, dự đoán kết quả, lập kế hoạch hành động. Ví dụ, Genie 3 gần đây của Google Genie 3 là một mô hình thế giới phổ quát có thể tạo ra các môi trường tương tác đa dạng chưa từng thấy.
-
Học tăng cường sâu (Deep Reinforcement Learning): Giúp robot học hành vi thông qua thử sai.
-
Điều khiển từ xa (Teleoperation): Cho phép điều khiển từ xa và cung cấp dữ liệu huấn luyện.
-
Học từ minh họa (LfD)/Học bắt chước (Imitation Learning): Dạy robot các kỹ năng mới bằng cách bắt chước hành động con người.
Hình bên dưới minh họa cách các phương pháp này hoạt động trong mô hình nền tảng robot.
Một số đột phá mã nguồn mở gần đây, như π0 của Physical Intelligence và Isaac GR00T N1 của NVIDIA, đánh dấu tiến triển quan trọng trong lĩnh vực này. Tuy nhiên, phần lớn các mô hình nền tảng robot vẫn tập trung hóa và đóng mã nguồn. Các công ty như Covariant, Tesla vẫn giữ mã và bộ dữ liệu độc quyền, chủ yếu do thiếu cơ chế khuyến khích mở.
Sự thiếu minh bạch này hạn chế sự hợp tác và tương tác giữa các nền tảng robot, làm nổi bật nhu cầu về chia sẻ mô hình minh bạch và an toàn, tiêu chuẩn trên chuỗi với quản trị cộng đồng và lớp tương tác xuyên thiết bị. Cách tiếp cận này sẽ thúc đẩy niềm tin, hợp tác và thúc đẩy sự phát triển mạnh mẽ hơn trong lĩnh vực này.
1.3 Lớp dữ liệu: "Tri thức" của bộ não
Bộ dữ liệu robot mạnh mẽ dựa vào ba trụ cột: số lượng, chất lượng và tính đa dạng.
Dù ngành đã nỗ lực tích lũy dữ liệu, quy mô bộ dữ liệu robot hiện có vẫn còn rất khiêm tốn. Ví dụ, GPT-3 của OpenAI được huấn luyện trên 300 tỷ token, trong khi bộ dữ liệu robot mã nguồn mở lớn nhất Open X-Embodiment chỉ chứa hơn 1 triệu đường đi thực tế của robot, bao gồm 22 loại robot. Khoảng cách so với quy mô dữ liệu cần thiết để đạt được khả năng tổng quát mạnh mẽ là cực kỳ lớn.
Một số phương pháp riêng quyền, ví dụ như Tesla thu thập dữ liệu qua nhà máy dữ liệu, nơi nhân viên mặc đồ bắt chuyển động để tạo dữ liệu huấn luyện, thực sự giúp thu thập thêm dữ liệu chuyển động thực tế. Tuy nhiên, các phương pháp này tốn kém, thiếu tính đa dạng dữ liệu và khó mở rộng.
Để đối phó các thách thức này, lĩnh vực robot đang tận dụng ba nguồn dữ liệu chính sau:
-
Dữ liệu Internet: Dữ liệu Internet có quy mô lớn và dễ mở rộng, nhưng chủ yếu là dữ liệu quan sát, thiếu tín hiệu cảm biến và chuyển động. Việc tiền huấn luyện các mô hình ngôn ngữ hình ảnh lớn (như GPT-4V và Gemini) trên dữ liệu Internet có thể cung cấp tiên nghiệm ngữ nghĩa và thị giác quý giá. Ngoài ra, gắn nhãn động học cho video có thể biến video thô thành dữ liệu huấn luyện có thể thao tác.
-
Dữ liệu tổng hợp: Dữ liệu tổng hợp được tạo ra qua mô phỏng có thể nhanh chóng thực hiện thí nghiệm quy mô lớn và bao phủ nhiều tình huống đa dạng, nhưng không thể phản ánh đầy đủ sự phức tạp của thế giới thực, hạn chế này được gọi là "khoảng cách mô phỏng-thực tế" (sim-to-real gap). Các nhà nghiên cứu giải quyết vấn đề này thông qua thích nghi miền (như tăng cường dữ liệu, ngẫu nhiên hóa miền, học đối kháng) và chuyển giao mô phỏng-thực tế, lặp đi lặp lại để tối ưu mô hình và kiểm tra, tinh chỉnh trong môi trường thực tế.
-
Dữ liệu thế giới thực: Mặc dù khan hiếm và đắt đỏ, dữ liệu thế giới thực rất quan trọng để triển khai mô hình và thu hẹp khoảng cách giữa mô phỏng và triển khai thực tế. Dữ liệu thực tế chất lượng cao thường bao gồm góc nhìn nội tâm (egocentric views), ghi lại những gì robot "thấy" trong nhiệm vụ, và dữ liệu chuyển động, ghi lại hành động chính xác của nó. Dữ liệu chuyển động thường được thu thập qua minh họa con người hoặc điều khiển từ xa, sử dụng thực tế ảo (VR), thiết bị bắt chuyển động hoặc dạy xúc giác, đảm bảo mô hình học từ các ví dụ thực tế chính xác.
Nghiên cứu cho thấy việc kết hợp dữ liệu Internet, dữ liệu thế giới thực và dữ liệu tổng hợp để huấn luyện robot mang lại hiệu quả huấn luyện và độ vững chắc (robustness) tốt hơn đáng kể so với việc chỉ dựa vào một nguồn dữ liệu duy nhất (TechFlow chú thích: chỉ hệ thống có khả năng giữ vững và mạnh mẽ ngay cả khi xảy ra ngoại lệ, tình huống nguy hiểm).
Đồng thời, dù tăng số lượng dữ liệu có ích, tính đa dạng của dữ liệu còn quan trọng hơn, đặc biệt để đạt được khả năng tổng quát hóa với nhiệm vụ và hình dạng robot mới. Để đạt được tính đa dạng này, cần có nền tảng dữ liệu mở và chia sẻ dữ liệu hợp tác, bao gồm việc tạo ra các bộ dữ liệu liên thể loại hỗ trợ nhiều hình dạng robot, từ đó thúc đẩy phát triển các mô hình nền tảng mạnh mẽ hơn.
1.4 Lớp đại lý: "Đại lý AI vật lý"
Xu hướng phát triển các đại lý AI vật lý đang tăng tốc, những robot tự trị này có thể hành động độc lập trong thế giới thực. Sự tiến bộ ở lớp đại lý phụ thuộc vào việc tinh chỉnh mô hình, học liên tục và thích ứng thực tế cho hình dạng độc đáo của từng robot.
Dưới đây là một số cơ hội mới nổi thúc đẩy sự phát triển của đại lý AI vật lý:
-
Học liên tục và cơ sở hạ tầng thích ứng: Cho phép robot cải thiện liên tục thông qua vòng phản hồi thời gian thực và chia sẻ kinh nghiệm trong quá trình triển khai.
-
Nền kinh tế đại lý tự trị: Robot hoạt động như nền kinh tế độc lập — giao dịch tài nguyên trên thị trường robot, như khả năng tính toán và dữ liệu cảm biến, và tạo doanh thu thông qua dịch vụ được mã hóa thành token.
-
Hệ thống đa đại lý: Các nền tảng và thuật toán thế hệ mới cho phép nhóm robot phối hợp, hợp tác và tối ưu hóa hành vi tập thể.
Sự kết hợp giữa robot AI và Web3: Giải phóng tiềm năng thị trường khổng lồ
Khi robot AI chuyển từ giai đoạn nghiên cứu sang triển khai thực tế, nhiều điểm nghẽn kéo dài đang cản trở đổi mới và hạn chế khả năng mở rộng, độ vững chắc và tính khả thi về mặt kinh tế của hệ sinh thái robot. Những điểm nghẽn này bao gồm các đảo dữ liệu và mô hình tập trung, thiếu niềm tin và truy xuất nguồn gốc, giới hạn về quyền riêng tư và tuân thủ, cũng như thiếu tính tương tác.
2.1 Các điểm đau của robot AI
-
Các đảo dữ liệu và mô hình tập trung
Các mô hình robot cần bộ dữ liệu lớn và đa dạng. Tuy nhiên, việc phát triển dữ liệu và mô hình ngày nay rất tập trung, phân mảnh và tốn kém, dẫn đến các hệ thống bị chia cắt và khả năng thích ứng kém. Những robot được triển khai trong môi trường thực tế động thường hoạt động kém do thiếu tính đa dạng dữ liệu và mô hình có độ vững chắc hạn chế.
-
Niềm tin, truy xuất nguồn gốc và độ tin cậy
Thiếu hồ sơ minh bạch và có thể kiểm toán (bao gồm nguồn dữ liệu, quá trình huấn luyện mô hình và lịch sử vận hành robot) làm suy yếu niềm tin và trách nhiệm. Đây là rào cản chính khiến người dùng, cơ quan quản lý và doanh nghiệp ngại áp dụng robot.
-
Quyền riêng tư, an toàn và tuân thủ
Trong các ứng dụng nhạy cảm như robot y tế và gia đình, việc bảo vệ quyền riêng tư là cực kỳ quan trọng và phải tuân thủ nghiêm ngặt các quy định khu vực (như Quy định Bảo vệ Dữ liệu Chung GDPR của châu Âu). Cơ sở hạ tầng tập trung gặp khó khăn trong việc hỗ trợ hợp tác AI an toàn và bảo vệ quyền riêng tư, hạn chế việc chia sẻ dữ liệu và kìm hãm đổi mới trong các lĩnh vực được kiểm soát hoặc nhạy cảm.
-
Khả năng mở rộng và tính tương tác
Các hệ thống robot gặp thách thức lớn trong việc chia sẻ tài nguyên, học tập hợp tác và tích hợp xuyên suốt nhiều nền tảng và hình dạng. Những giới hạn này dẫn đến sự phân mảnh hiệu ứng mạng và cản trở việc chuyển giao nhanh khả năng giữa các loại robot khác nhau.
2.2 Robot AI x Web3: Giải pháp cấu trúc mở ra cơ hội đầu tư
Công nghệ Web3 giải quyết tận gốc các điểm đau nêu trên thông qua mạng lưới robot phi tập trung, có thể xác minh, bảo vệ quyền riêng tư và hợp tác. Sự kết hợp này đang mở ra những cơ hội thị trường đầu tư mới:
-
Phát triển hợp tác phi tập trung: Thông qua mạng lưới được thúc đẩy bởi động lực, robot có thể chia sẻ dữ liệu, cùng phát triển mô hình và đại lý trí tuệ.
-
Truy xuất nguồn gốc và trách nhiệm có thể xác minh: Công nghệ blockchain đảm bảo hồ sơ bất biến về nguồn gốc dữ liệu và mô hình, danh tính robot và lịch sử vận hành, điều này rất quan trọng đối với niềm tin và tuân thủ.
-
Hợp tác bảo vệ quyền riêng tư: Các giải pháp mật mã tiên tiến cho phép robot cùng huấn luyện mô hình và chia sẻ thông tin mà không tiết lộ dữ liệu độc quyền hoặc nhạy cảm.
-
Quản trị do cộng đồng dẫn dắt: Tổ chức tự trị phi tập trung (DAOs) hướng dẫn và giám sát hoạt động robot thông qua các quy tắc và chính sách minh bạch, bao gồm trên chuỗi.
-
Tương tác xuyên hình dạng: Khung làm việc mở dựa trên blockchain thúc đẩy sự hợp tác liền mạch giữa các nền tảng robot khác nhau, giảm chi phí phát triển và tăng tốc chuyển giao khả năng.
-
Nền kinh tế đại lý tự trị: Cơ sở hạ tầng Web3 trao cho robot danh tính đại lý kinh tế độc lập, cho phép chúng thực hiện giao dịch ngang hàng, thương lượng và tham gia thị trường được mã hóa thành token mà không cần can thiệp con người.
-
Mạng lưới cơ sở hạ tầng vật lý phi tập trung (DePIN): Chia sẻ tài nguyên điện toán, cảm biến, lưu trữ và kết nối ngang hàng dựa trên blockchain nâng cao khả năng mở rộng và độ bền của mạng lưới robot.
Dưới đây là một số dự án sáng tạo đang thúc đẩy lĩnh vực này, minh họa tiềm năng và xu hướng của sự kết hợp giữa robot AI và Web3. Tất nhiên, đây chỉ mang tính tham khảo và không cấu thành lời khuyên đầu tư.
Phát triển dữ liệu và mô hình phi tập trung
Các nền tảng dựa trên Web3 dân chủ hóa việc phát triển dữ liệu và mô hình bằng cách khuyến khích đóng góp (như mặc đồ bắt chuyển động, chia sẻ cảm biến, tải lên hình ảnh, gán nhãn dữ liệu, thậm chí tạo dữ liệu tổng hợp). Cách tiếp cận này có thể xây dựng các bộ dữ liệu và mô hình phong phú, đa dạng và đại diện hơn nhiều so với khả năng của một công ty đơn lẻ. Khung phi tập trung còn nâng cao khả năng bao phủ các trường hợp biên, điều này cực kỳ quan trọng đối với robot hoạt động trong môi trường không thể đoán trước.
Ví dụ:
-
Frodobots: Giao thức crowdsourcing bộ dữ liệu thế giới thực thông qua trò chơi robot. Họ đã ra mắt dự án "Earth Rovers" — một robot vỉa hè và trò chơi toàn cầu "Drive to Earn", thành công tạo ra bộ dữ liệu FrodoBots 2K Dataset bao gồm hình ảnh camera, dữ liệu GPS, ghi âm và dữ liệu điều khiển con người, trải rộng hơn 10 thành phố, tích lũy khoảng 2000 giờ dữ liệu lái robot điều khiển từ xa.
-
BitRobot: Nền tảng khuyến khích mã hóa do FrodoBots Lab và Protocol Labs cùng phát triển, dựa trên blockchain Solana và kiến trúc subnet. Mỗi subnet được thiết lập thành thử thách công khai, người đóng góp nhận thưởng token khi nộp mô hình hoặc dữ liệu, khuyến khích hợp tác toàn cầu và đổi mới mã nguồn mở.
-
Reborn Network: Tầng nền tảng cho hệ sinh thái robot AGI mở, cung cấp Rebocap - đồ bắt chuyển động, cho phép bất kỳ ai ghi lại và kiếm lợi nhuận từ dữ liệu chuyển động thực tế của chính mình, hỗ trợ mở hóa bộ dữ liệu robot hình người phức tạp.
-
PrismaX: Tận dụng sức mạnh của cộng đồng đóng góp toàn cầu, thông qua cơ sở hạ tầng phi tập trung đảm bảo tính đa dạng và xác thực dữ liệu, triển khai cơ chế xác minh và khuyến khích mạnh mẽ, thúc đẩy mở rộng quy mô bộ dữ liệu robot.
Chứng minh truy xuất nguồn gốc và độ tin cậy
Công nghệ blockchain cung cấp tính minh bạch và trách nhiệm suốt chuỗi cho hệ sinh thái robot. Nó đảm bảo truy xuất nguồn gốc có thể xác minh cho dữ liệu và mô hình, xác thực danh tính và vị trí vật lý của robot, và duy trì hồ sơ rõ ràng về lịch sử vận hành và sự tham gia của người đóng góp. Ngoài ra, xác minh hợp tác, hệ thống uy tín trên chuỗi và cơ chế xác minh dựa trên cổ phần đảm bảo chất lượng dữ liệu và mô hình, ngăn chặn đầu vào chất lượng thấp hoặc gian lận làm tổn hại hệ sinh thái.
Ví dụ:
-
OpenLedger: Một cơ sở hạ tầng blockchain AI sử dụng bộ dữ liệu do cộng đồng sở hữu để huấn luyện và triển khai mô hình chuyên dụng. Bằng cơ chế “Proof of Attribution” (Bằng chứng Thuộc về), đảm bảo người đóng góp dữ liệu chất lượng cao nhận được phần thưởng công bằng
Mã hóa quyền sở hữu, giấy phép và thương mại hóa
Các công cụ sở hữu trí tuệ bản địa Web3 hỗ trợ cấp phép mã hóa cho bộ dữ liệu chuyên dụng, khả năng robot, mô hình và đại lý trí tuệ. Người đóng góp có thể sử dụng hợp đồng thông minh để nhúng trực tiếp điều khoản cấp phép vào tài sản của họ, đảm bảo nhận thanh toán bản quyền tự động khi dữ liệu hoặc mô hình được tái sử dụng hoặc thương mại hóa. Cách tiếp cận này thúc đẩy truy cập minh bạch, không cần cấp phép và tạo ra thị trường mở, công bằng cho dữ liệu và mô hình robot.
Ví dụ:
-
Poseidon: Lớp dữ liệu phi tập trung toàn diện xây dựng trên giao thức Story tập trung vào IP, cung cấp dữ liệu huấn luyện AI được ủy quyền pháp lý.
Giải pháp bảo vệ quyền riêng tư
Dữ liệu giá trị cao được tạo ra trong các bối cảnh như bệnh viện, phòng khách sạn hay gia đình, mặc dù khó thu thập qua kênh công cộng, nhưng thông tin ngữ cảnh phong phú có thể nâng cao đáng kể hiệu suất mô hình nền tảng. Việc chuyển đổi dữ liệu riêng tư thành tài sản trên chuỗi thông qua các giải pháp mã hóa giúp chúng có thể truy vết, kết hợp và tạo giá trị, đồng thời bảo vệ quyền riêng tư. Các công nghệ như Môi trường Thực thi Đáng tin cậy (TEEs) và Chứng minh Không kiến thức (ZKPs) hỗ trợ tính toán an toàn và xác minh kết quả mà không tiết lộ dữ liệu gốc. Các công cụ này cho phép tổ chức huấn luyện mô hình AI trên dữ liệu nhạy cảm phân tán, đồng thời duy trì quyền riêng tư và tuân thủ.
Ví dụ:
-
Phala Network: Cho phép các nhà phát triển triển khai ứng dụng vào TEE an toàn để xử lý AI và dữ liệu bí mật.
Quản trị minh bạch và có thể kiểm toán
Việc huấn luyện robot thường phụ thuộc vào các hệ thống hộp đen độc quyền thiếu minh bạch và khả năng thích ứng. Quản trị minh bạch và có thể xác minh là rất quan trọng để giảm rủi ro và tăng niềm tin từ người dùng, cơ quan quản lý và doanh nghiệp. Công nghệ Web3 thực hiện việc phát triển hợp tác mã nguồn mở cho trí tuệ robot thông qua giám sát do cộng đồng dẫn dắt trên chuỗi.
Ví dụ:
-
Openmind: Một ngăn xếp phần mềm bản địa AI mở, giúp robot suy nghĩ, học hỏi và hợp tác làm việc. Họ đề xuất tiêu chuẩn ERC7777, nhằm xây dựng hệ sinh thái robot được quy tắc hóa và có thể xác minh, tập trung vào an toàn, minh bạch và khả năng mở rộng. Tiêu chuẩn này định nghĩa các giao diện chuẩn hóa để quản lý danh tính con người và robot, thực thi bộ quy tắc xã hội, cũng như đăng ký và loại bỏ người tham gia, rõ ràng hóa quyền và trách nhiệm liên quan.
Suy nghĩ cuối cùng
Cùng với sự kết hợp giữa robot AI và công nghệ Web3, chúng ta đang bước vào một kỷ nguyên hoàn toàn mới nơi các hệ thống tự trị có thể hợp tác và thích nghi quy mô lớn. 3 đến 5 năm tới sẽ là giai đoạn then chốt, khi phần cứng phát triển nhanh chóng sẽ thúc đẩy sự ra đời của các mô hình AI mạnh mẽ hơn, dựa trên các bộ dữ liệu thế giới thực phong phú hơn và cơ chế hợp tác phi tập trung. Chúng tôi dự đoán các đại lý AI chuyên dụng sẽ nổi lên trong nhiều ngành như khách sạn, hậu cần, tạo ra cơ hội thị trường mới khổng lồ.
Tuy nhiên, sự kết hợp giữa robot AI và công nghệ mã hóa này cũng đặt ra thách thức. Thiết kế các cơ chế khuyến khích cân bằng và hiệu quả vẫn còn phức tạp và đang liên tục phát triển, hệ thống cần thưởng cho người đóng góp một cách công bằng đồng thời tránh bị lạm dụng. Độ phức tạp kỹ thuật cũng là một thách thức lớn, đòi hỏi phát triển các giải pháp vững chắc và có thể mở rộng để tích hợp liền mạch nhiều loại robot. Hơn nữa, công nghệ bảo vệ quyền riêng tư phải đủ đáng tin cậy để giành được niềm tin từ các bên liên quan, đặc biệt khi xử lý dữ liệu nhạy cảm. Môi trường quản lý thay đổi nhanh cũng yêu cầu thận trọng để đảm bảo tuân thủ trong các khu vực pháp lý khác nhau. Giải quyết các rủi ro này và đạt được lợi nhuận bền vững là chìa khóa thúc đẩy tiến bộ công nghệ và ứng dụng rộng rãi.
Hãy cùng theo dõi sự phát triển của lĩnh vực này, thúc đẩy tiến bộ thông qua hợp tác và nắm bắt các cơ hội xuất hiện trong thị trường đang mở rộng nhanh chóng này.
Hành trình đổi mới công nghệ robot là một chuyến đi tốt nhất nên thực hiện cùng nhau :)
Cuối cùng, tôi xin cảm ơn "Công nghệ robot & Kỷ nguyên AI Vật lý (Robotics & The Age of Physical AI)" của Chain of Thought đã hỗ trợ quý báu cho nghiên cứu của tôi.
Chào mừng tham gia cộng đồng chính thức TechFlow
Nhóm Telegram:https://t.me/TechFlowDaily
Tài khoản Twitter chính thức:https://x.com/TechFlowPost
Tài khoản Twitter tiếng Anh:https://x.com/BlockFlow_News