
한 문장으로 이해하는 OpenMind: 몸을 가진 지능을 위한 글로벌 운영체제와 신뢰 네트워크 구축
왜 개방형 로봇 시대가 필요한가
앞으로 5~8년 이내에 지구상의 로봇 수는 10억 대를 돌파할 것이며, 이는 로봇이 '단일 기기 데모'에서 '사회적 분업'으로 전환하는 중대한 전환점이다. 로봇은 단순히 생산라인 위의 로봇 팔을 넘어 감지하고, 이해하며, 결정을 내리고 인간과 협력할 수 있는 '동료, 선생님, 동반자'가 될 것이다.
최근 몇 년간 로봇 하드웨어는 근육처럼 급속도로 발전하여 더 정교한 손, 더 안정적인 보행, 그리고 더욱 풍부한 센싱 능력을 갖추게 되었다. 그러나 진정한 병목은 금속과 모터에 있지 않고, 로봇들이공유와 협업의 인지를 갖도록 만드는 것에 있다:
-
각 제조사의 소프트웨어가 호환되지 않아 로봇 간에 기술과 지능을 공유할 수 없다;
-
결정 논리는 폐쇄된 시스템에 묶여 있어 외부에서 검증하거나 최적화할 수 없다;
-
중앙집중식 제어 구조는 혁신 속도가 제한되고 신뢰 비용이 높다는 것을 의미한다.
이러한 단절은 AI 모델의 발전이 로봇 산업에서 재현 가능한 생산력으로 전환되는 것을 어렵게 한다: 단일 로봇의 데모는 계속 등장하지만, 장치 간 이식성, 검증 가능한 의사결정, 표준화된 협업이 부족해 규모화하기 어렵다. OpenMind이 해결하려는 것은 바로 이러한 '마지막 1km' 문제다. 우리의 목표는 춤을 더 잘 추는 로봇 하나를 만드는 것이 아니라, 전 세계적으로 방대한 이종 로봇들에게 통합된 소프트웨어 기반과 협업 표준을 제공하는 것이다:
-
로봇이 맥락을 이해하고 서로 학습할 수 있도록 한다;
-
개발자가 오픈소스, 모듈화된 아키텍처 위에서 신속하게 애플리케이션을 구축할 수 있도록 한다;
-
사람과 기계가 탈중앙화된 규칙 아래에서 안전하게 협업하고 정산할 수 있도록 한다.
한 마디로, OpenMind는 로봇의 범용 운영체제를 구축하여 로봇이 감지하고 행동할 수 있을 뿐만 아니라 탈중앙화된 협업을 통해 어떤 환경에서도 안전하고 규모화된 협업이 가능하도록 하고 있다.
누가 이 길에 베팅하고 있는가: 2천만 달러 투자 유치와 글로벌 라인업
현재 OpenMind는 Pantera Capital이 주도한 2천만 달러(시드+시리즈 A)의 투자를 성공적으로 마쳤으며, 투자 라인업에는 전 세계 최정상급의 기술 및 자본 세력이 포함되어 있다:
-
서양의 기술 및 자본 생태계: Ribbit, Coinbase Ventures, DCG, Lightspeed Faction, Anagram, Pi Network Ventures, Topology, Primitive Ventures, Amber Group 등은 암호화폐 및 AI 인프라에 오랫동안 깊이 관여하며 '에이전트 경제 및 머신 인터넷'의 기반 패러다임에 베팅하고 있다;
-
동양의 산업 역량: 실리콘밸리의 유수한 VC 중 하나인 Sequoia China는 로봇 공급망과 제조 체계에 깊이 관여하며 '로봇 한 대를 만들어내고 규모화하여 납품하는 것'의 모든 어려움과 장벽을 이해하고 있다;
동시에 OpenMind는 KraneShares 등 전통 금융시장 참여자들과도 긴밀한 소통을 유지하며 '로봇 + 에이전트'의 장기적 가치를 금융 구조화 상품에 포함시키는 경로를 함께 모색하고 있으며, 이를 통해 가상자산과 주식 시장의 양방향 연결을 실현하고 있다. 2025년 6월, KraneShares가 글로벌 휴머노이드 및 엠바디드 인텔리전스 지수 ETF(KOID)를 출시할 때, OpenMind와 RoboStore가 공동 개발한 휴머노이드 로봇 'Iris'를 나스닥 개장 종타자로 선정했다. 이는 거래소 역사상 처음으로 휴머노이드 로봇이 이 의식을 수행한 사례였다.
Pantera Capital의 파트너 Nihal Maunder가 말한 것처럼:
"만약 우리가 스마트 머신이 개방된 환경에서 작동하기를 원한다면, 개방된 지능 네트워크가 필요하다. OpenMind가 로봇을 위해 하는 일은 리눅스가 소프트웨어에, 이더리움이 블록체인에 해온 일과 같다."
팀 및 자문진: 실험실에서 생산라인까지
OpenMind의 창립자 Jan Liphardt는 스탠포드 대학교 부교수이자 전 버클리 교수로, 데이터 및 분산 시스템 분야에서 오랫동안 연구해왔으며 학계와 엔지니어링 측면 모두에서 깊은 경험을 가지고 있다. 그는 오픈소스 재사용을 추진하고, 검토 가능하고 추적 가능한 메커니즘으로 블랙박스를 대체하며, AI, 로봇, 암호학을 융합하는 다학제적 방법론을 주장한다.
OpenMind의 핵심 팀은 OKX Ventures, 옥스퍼드 로보틱스 연구소, Palantir, Databricks, Perplexity 등 기관 출신으로 구성되어 있으며, 로봇 제어, 감지 및 내비게이션, 멀티모달 및 LLM 스케줄링, 분산 시스템 및 체인상 프로토콜 등의 핵심 분야를 아우른다. 동시에 학계 및 산업계 전문가들로 구성된 자문진(스탠포드 로봇 책임자 Steve Cousins, 옥스퍼드 블록체인센터 Bill Roscoe, 임페리얼 칼리지 보안 AI 교수 Alessio Lomuscio 등)은 로봇의 '안전성, 규정 준수, 신뢰성'을 보장하고 있다.
OpenMind의 해법: 두 가지 계층, 하나의 질서
OpenMind는 로봇이 장치 간, 제조사 간, 심지어 국가 간에도 협업하고 정보를 교환할 수 있는 재사용 가능한 인프라를 구축했다:
-
장치 측: 물리적 로봇을 위한 AI 네이티브 운영체제 OM1을 제공하여 감지부터 실행까지 전체 흐름을 폐루프로 연결함으로써 다양한 형태의 로봇이 환경을 이해하고 작업을 완수할 수 있게 한다;
-
네트워크 측: 탈중앙화 협업 네트워크 FABRIC을 구축하여 신원, 작업 할당, 통신 메커니즘을 제공함으로써 로봇이 협업 시 서로를 인식하고, 작업을 배분하며, 상태를 공유할 수 있도록 한다.
이러한 '운영체제 + 네트워크 계층' 조합은 로봇들이 각자 움직일 수 있을 뿐만 아니라 통합된 협업 네트워크 내에서 서로 협력하고 절차를 맞추며 복잡한 과제를 함께 완수할 수 있게 한다.
OM1: 물리적 세계를 위한 AI 네이티브 운영체제
스마트폰이 앱을 실행하기 위해 iOS 또는 Android가 필요하듯, 로봇도 AI 모델을 실행하고 센서 데이터를 처리하며 추론 결정을 내리고 동작을 수행할 수 있는 운영체제가 필요하다.
OM1은 바로 이러한 목적을 위해 탄생한 것으로, 현실 세계의 로봇을 위한 AI 네이티브 운영체제로서 로봇이 감지하고, 이해하며, 계획을 세우고 다양한 환경에서 작업을 수행할 수 있게 한다. 기존의 폐쇄적인 로봇 제어 시스템과 달리 OM1은 오픈소스이며 모듈화되고 하드웨어 독립적(hardware-agnostic)이다. 인간형, 4족, 바퀴형, 로봇 팔 등 다양한 형태에서 실행될 수 있다.
네 가지 핵심 단계: 감지에서 실행까지
OM1은 로봇 지능을 네 가지 일반적인 단계로 나눈다: Perception(감지) → Memory(기억) → Planning(계획) → Action(실행). 이 프로세스는 OM1에 의해 완전히 모듈화되며 통합된 데이터 언어로 연결되어 조합 가능하고, 교체 가능하며, 검증 가능한 지능 구축이 가능하다.
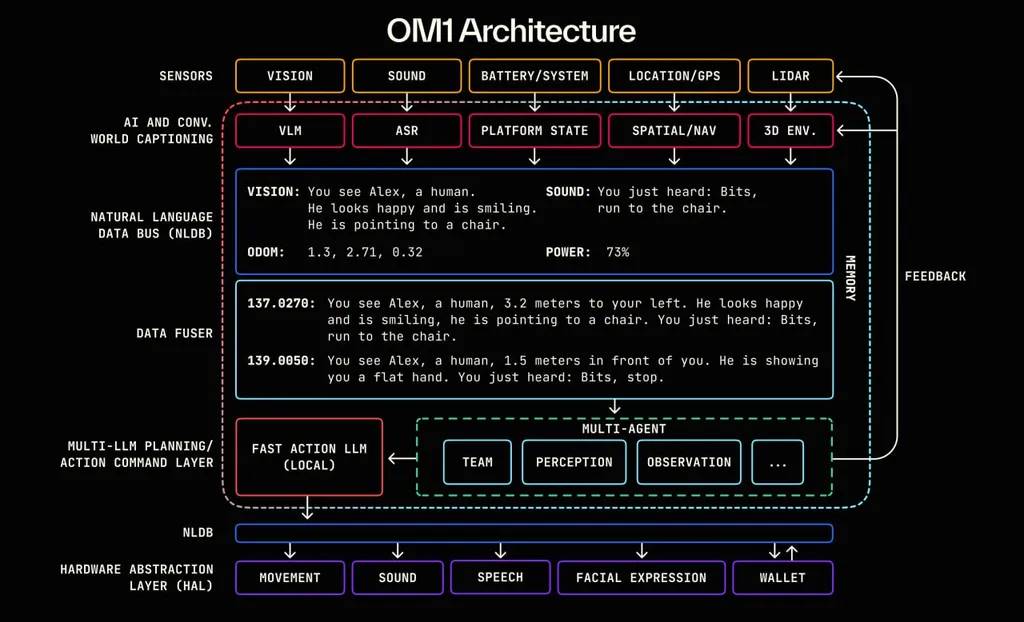
OM1의 아키텍처
구체적인 아키텍처 측면에서 OM1은 다음과 같은 7단계 흐름을 가진다:
-
Sensor Layer(센서 계층) 정보 수집: 카메라, LIDAR, 마이크, 배터리 상태, GPS 등 다양한 모달리티를 통해 감지 입력을 수행한다.
-
AI + World Captioning Layer(세계 이해 계층) 정보 번역: 멀티모달 모델이 시각, 음성, 상태 등을 자연어 설명(예: "당신이 누군가가 손을 흔드는 것을 본다")로 변환한다.
-
Natural Language Data Bus(자연어 데이터 버스) 정보 전달: 모든 감지는 타임스탬프가 붙은 언어 조각으로 변환되어 서로 다른 모듈 간에 전달된다.
-
Data Fuser(맥락 융합 계층) 정보 결합: 다중 소스 입력을 통합하여 의사결정을 위한 완전한 맥락(prompt)을 생성한다.
-
Multi-AI Planning/Decision Layer(다중 AI 계획 계층) 결정 생성: 여러 LLM이 맥락을 읽고 체인 상의 규칙을 결합하여 작업 계획을 생성한다.
-
NLDB 하향 채널: 결정 결과를 언어 중간 계층을 통해 하드웨어 실행 시스템에 전달한다.
-
Hardware Abstraction Layer(하드웨어 추상화 계층) 동작 수행: 언어 명령을 저수준 제어 명령으로 변환하여 하드웨어가 동작(이동, 음성 출력, 거래 등)을 수행하도록 한다.
빠르게 시작하고 광범위하게 적용
아이디어를 빠르게 로봇이 수행하는 작업으로 구현하기 위해 OM1은 다음 도구들을 내장하고 있다:
-
빠른 신기술 추가: 자연어와 대규모 모델을 사용하면 수 시간 안에 새로운 행동을 로봇에 추가할 수 있으며, 몇 달간의 하드코딩이 필요 없다.
-
멀티모달 조합: LiDAR, 비전, 음성 등의 감지를 쉽게 융합하여 개발자가 복잡한 센서 융합 로직을 직접 작성할 필요가 없다.
-
미리 설정된 대규모 모델 인터페이스: GPT-4o, DeepSeek, VLMs 등 언어/시각 모델을 내장하여 음성 상호작용을 지원한다.
-
광범위한 소프트웨어 및 하드웨어 호환성: ROS2, Cyclone DDS 등 주요 프로토콜을 지원하여 기존 로봇 미들웨어와 무결합 연결이 가능하다. Unitree G1 휴머노이드, Go2 4족 로봇, Turtlebot, 로봇 팔 등 모두 직접 접속 가능하다.
-
FABRIC 연동: OM1은 신원, 작업 조정, 체인 상 결제를 기본 지원하여 로봇이 단독 작업을 수행할 뿐 아니라 글로벌 협업 네트워크에 참여할 수 있다.
현재 OM1은 이미 여러 실제 시나리오에 적용되었다:
-
Frenchie(Unitree Go2 4족 로봇개): USS Hornet 국방 기술 전시회 2024에서 복잡한 현장 작업을 완수했다.
-
Iris(Unitree G1 휴머노이드 로봇): EthDenver 2025 코인데스크 전시회에서 현장 인간-기계 상호작용 데모를 진행했으며, RoboStore의 교육 프로그램을 통해 전미 대학 강의에 진입할 예정이다.
FABRIC: 탈중앙화된 인간-기계 협업 네트워크
강력한 두뇌를 갖췄더라도 로봇들 사이에 안전하고 신뢰할 수 있는 협업이 불가능하다면 여전히 각개격파 상태에 머무를 수밖에 없다. 현실에서는 서로 다른 제조사의 로봇들이 각자 독립된 시스템을 구축하고 운영하며 기술과 데이터를 공유할 수 없고, 브랜드 간 또는 국가 간 협업에는 더욱더 신뢰할 수 있는 신원과 표준 규칙이 부족하다. 따라서 다음과 같은 문제가 발생한다:
-
신원 및 위치 증명: 로봇은 자신이 누구인지, 어디에 있는지, 무엇을 하고 있는지를 어떻게 증명할 수 있는가?
-
기술 및 데이터 공유: 어떻게 로봇이 데이터를 공유하고 기술을 호출하도록 권한을 부여할 수 있는가?
-
제어권 정의: 기술 사용 빈도, 범위, 데이터 반송 조건 등을 어떻게 설정할 수 있는가?
FABRIC은 이러한 문제들을 해결하기 위해 설계된 것이다. FABRIC은 OpenMind가 구축한 탈중앙화 인간-기계 협업 네트워크로서 로봇 및 스마트 시스템에 신원, 작업, 통신, 정산의 통합 인프라를 제공한다. 이를 다음과 같이 이해할 수 있다:
-
GPS처럼 로봇들이 서로의 위치를 알고, 가까운지, 협업이 적합한지 판단할 수 있다;
-
VPN처럼 로봇들이 공용 IP나 복잡한 네트워크 설정 없이도 안전하게 직결할 수 있다;
-
작업 스케줄링 시스템처럼 작업을 자동으로 게시하고, 수신하며, 실행 전 과정을 기록할 수 있다.
핵심 응용 시나리오
FABRIC은 다음과 같은 실용적 시나리오에 이미 적용 가능하다:
-
원격 제어 및 모니터링: 전용 네트워크 없이 어디서든 로봇을 안전하게 제어할 수 있다.
-
Robot-as-a-Service 시장: 택시처럼 로봇을 호출하여 청소, 점검, 배달 등의 작업을 완료할 수 있다.
-
크라우드소싱 맵 및 데이터 수집: 차량 군단이나 로봇들이 실시간으로 도로 상태, 장애물, 환경 변화를 업로드하여 공유 가능한 고정밀 지도를 생성한다.
-
수요 기반 스캔/측량: 인근 로봇을 일시적으로 호출하여 3D 모델링, 건축 측량, 보험 사례의 증거 수집 등을 수행할 수 있다.
FABRIC은 '누가, 어디서, 무엇을 완료했는가'를 검증하고 추적할 수 있게 하며, 기술 호출과 작업 실행에 명확한 경계를 제공한다.
장기적으로 FABRIC은 머신 인텔리전스의 앱스토어가 될 것이다: 기술이 전 세계적으로 라이선스되고 호출되며, 호출에서 생성된 데이터는 모델을 다시 훈련시켜 협업 네트워크의 지속적인 진화를 촉진한다.
Web3이 '개방성'을 머신 사회에 각인시키고 있다
현실에서 로봇 산업은 가속화되며少数 플랫폼이 하드웨어, 알고리즘, 네트워크를 장악하고 외부의 혁신을 배제하고 있다. 탈중앙화의 의미는 로봇이 누구에게 의해 제조되었는지, 어느 나라에서 운영되든지 간에 개방된 네트워크 내에서 협업하고, 기술을 교환하며, 보상을 정산할 수 있다는 것이며, 특정 단일 플랫폼에 종속될 필요가 없다는 것이다.
OpenMind는 체인 상 인프라를 이용하여 협업 규칙, 기술 접근 권한, 보상 분배 방식을 공개적이고 검증 가능하며 개선 가능한 '네트워크 질서'로 작성한다:
-
검증 가능한 신원: 모든 로봇과 운영자는 체인 상에 고유한 신원(ERC-7777 표준)을 등록하며, 하드웨어 특징, 책임 범위, 권한 수준은 투명하게 조회 가능하다.
-
공개적인 작업 배분: 작업은 폐쇄된 블랙박스 내에서 배분되는 것이 아니라 공개된 규칙 하에 게시, 입찰, 매칭되며; 모든 협업 과정은 시간과 위치가 포함된 암호화 증명을 생성하여 체인 상에 저장된다.
-
자동 정산 및 수익 분배: 작업 완료 후 수익 분배, 보험, 보증금의 지급 또는 공제가 자동으로 실행되며, 모든 참여자는 실시간으로 결과를 검증할 수 있다.
-
기술 자유로운 유통: 새로운 기술은 체인 상 계약을 통해 호출 횟수, 적용 장치 등을 설정할 수 있어 지적재산권을 보호하면서도 기술이 전 세계적으로 자유롭게 유통되도록 한다.
이는 모든 참여자가 사용하고, 감시하며, 개선할 수 있는 협업 질서이다. Web3 사용자에게 이것은 로봇 경제가 탄생 초기부터 반독점, 조합 가능, 검증 가능한 유전자를 갖춘다는 것을 의미한다—이것은 단순한 시장 기회를 넘어서 '개방성'을 머신 사회의 기반에 새기는 기회이다.
엠바디드 인텔리전스를 고립섬에서 벗어나게 하다
병원에서 병동을 순찰하거나, 학교에서 새로운 기술을 배우거나, 도시 지역에서 점검과 모델링을 수행하든, 로봇들은 점차 '데모 부스'를 벗어나 인간의 일상적 분업에서 안정적인 구성 요소로 자리잡고 있다. 이들은 24시간 작동하며, 규칙을 따르고, 기억을 보유하며, 기술을 갖고 있으며, 인간과 다른 기계와 자연스럽게 협업할 수 있다.
이러한 시나리오가 실제로 규모화되기 위해서는 더 똑똑한 기계뿐 아니라 서로 간에 신뢰하고, 연결하고, 협업할 수 있는 기반 질서가 필요하다. OpenMind는 이미 OM1과 FABRIC을 통해 이 길 위에 첫 번째 '기초'를 마련했다: 전자는 로봇이 세상을 진정으로 이해하고 자율적으로 행동하게 하고, 후자는 이러한 능력을 글로벌 네트워크에서 유통되게 한다. 이제 남은 것은 이 길을 더 많은 도시와 네트워크로 확장하여 기계가 사회 네트워크에서 신뢰할 수 있는 장기적 동반자가 되게 하는 것이다.
OpenMind의 로드맵은 명확하다:
단기: OM1의 핵심 기능 프로토타입과 FABRIC MVP 완성, 체인 상 신원 및 기본 협업 기능 출시;
중기: 교육, 가정, 기업에 OM1과 FABRIC 적용, 초기 노드 연결 및 개발자 커뮤니티 형성;
장기: OM1과 FABRIC을 글로벌 표준으로 만들고, 모든 기계가 인터넷에 접속하듯이 이 개방된 로봇 협업 네트워크에 접속할 수 있도록 하며, 지속 가능한 글로벌 머신 경제를 형성한다.
Web2 시대에는 로봇이 단일 제조사의 폐쇄 시스템에 묶여 기능과 데이터가 플랫폼 간에 이동할 수 없었다. 그러나 OpenMind가 구축하는 세계에서는 로봇은 개방된 네트워크의 평등한 노드로서 자유롭게 참여하고, 학습하고, 협업하고, 정산할 수 있으며, 인간과 함께 신뢰 가능한 글로벌 머신 사회를 구성한다. OpenMind가 제공하는 것은 바로 이러한 전환이 규모화될 수 있도록 하는 강력한 능력이다.
TechFlow 공식 커뮤니티에 오신 것을 환영합니다
Telegram 구독 그룹:https://t.me/TechFlowDaily
트위터 공식 계정:https://x.com/TechFlowPost
트위터 영어 계정:https://x.com/BlockFlow_News













