

또 새로운 개념을 만들어내나? DeSPIN을 이해하고 주목할 만한 8가지 프로젝트
저자:cookies
번역: TechFlow
웹3 기술의 지속적인 발전과 함께 탈중앙화 공간지능 네트워크(Decentralized Spatial Intelligence Network, DeSPIN)는 주목받는 분야로 떠오르고 있다. 현실 세계의 시각 데이터를 분석하고 활용함으로써 DeSPIN은 지도 제작, 도시 계획, 로보틱스 분야에 혁신적인 솔루션을 제공할 뿐만 아니라 '기여하면 수익을 얻는(Contribute-to-Earn)' 새로운 경제 모델을 개척하고 있다. 본 글에서는 DeSPIN의 핵심 개념과 주요 프로토콜, 미래 전망을 상세히 살펴본다.

DeSPIN이란?
공간지능(Spatial Intelligence)은 현실 세계의 시각 데이터를 분석해 인사이트를 추출하는 기술이다. 이 기술의 핵심은 지리 정보와 환경 맥락을 결합하여 인간의 의사결정을 지원하는 것이다. 탈중앙화 공간지능 네트워크(DeSPIN)는 이러한 기술을 블록체인과 웹3의 탈중앙화 철학과 결합한 개방적이고 공유 가능한 생태계다. 예를 들어 일상생활에서 촬영한 도로 사진이나 쇼핑몰, 거리에서 기록한 환경 데이터를 공유함으로써 수익을 얻을 수 있다고 상상해보라. 이러한 모델은 데이터 수집의 진입 장벽을 낮출 뿐만 아니라 일반 사용자가 공간지능 발전에 기여하도록 유도한다.
DeSPIN의 구체적인 응용을 이해하기 전에 먼저 공간지능의 기본 구성 요소를 알아야 한다. 공간지능은 다음의 네 가지 핵심 요소로 구성된다.
-
데이터 수집: 카메라, GPS 등 센서 네트워크 및 스마트폰, 노트북 등의 사물인터넷(IoT) 기기를 통해 데이터를 수집한다.
-
데이터 처리 및 분석: 머신러닝 기술을 이용해 지리 메타데이터를 처리하고, 데이터 내 패턴을 식별하며 공간 질의 데이터베이스를 구축한다.
-
지식 표현: 의미론적 매핑을 통해 데이터를 환경 맥락과 연결하고 사용자에게 시각화된 지리 정보를 제공한다.
-
의사결정 지원 시스템: 공간 예측 모델을 구축하여 경로 최적화, 장애물 회피 등의 애플리케이션 서비스를 제공한다.
DeSPIN 분야의 주요 프로토콜
현재 DeSPIN 분야에는 다양한 응용 시나리오에 초점을 맞춘 여러 혁신적 프로토콜들이 등장하고 있다. 주목할 만한 8개의 프로젝트를 소개한다.
1. Hivemapper
Hivemapper는 '운전하면 수익을 얻는(Drive-2-Earn)' 모델을 채택한 탈중앙화 지도 제작 프로토콜이다. 사용자는 모바일 앱을 통해 실시간으로 도로 문제를 보고하고, 운전자들은 차량에 설치된 블랙박스로 데이터를 수집한다. AI 알고리즘은 수집된 데이터를 처리해 지도를 생성하며, 인간 피드백 강화학습(RLHF)을 통해 정확성을 검증한다. Hivemapper는 어떤 지역이 이미 매핑되었는지 확인할 수 있는 커버리지 지도를 제공하고, API를 통해 데이터에 접근할 수 있도록 한다. 데이터 기여자에게는 $HONEY 토큰이 보상으로 지급되며, 이 토큰은 지도 데이터 구매나 기타 서비스 이용에 사용할 수 있다.
2. NATIX Network
NATIX Network는 모바일 기기와 블랙박스를 활용해 도로 데이터를 수집하는 탈중앙화 지도 경제 프로토콜로, '운전하면 수익을 얻는' 모델을 운영한다. 핵심 기술 VX360은 360도 파노라마 데이터 수집을 가능하게 하며, 자율주행 최적화 등 운전 보조 기능 개발에 활용된다. 현재 NATIX Network는 171개 국가에 걸쳐 있으며, 등록 운전자 수는 22.3만 명을 넘고 누적 매핑 거리는 1억 3100만 km에 달한다. 데이터 기여자와 네트워크 노드 모두 $NATIX 토큰을 보상으로 받으며, 이를 통해 생태계 발전을 더욱 촉진한다.
Hivemapper와 NATIX Network는 모두 대중 참여 방식의 도로 데이터를 활용해 고품질 지도를 구축하는 것을 목표로 한다. 이러한 데이터는 다음과 같은 광범위한 응용 시나리오를 가진다.
-
도시 교통 최적화: 실시간 도로 데이터를 분석해 교통 흐름 관리를 개선하고 정체를 줄이며 이동 효율을 높인다.
-
도로 상태 모니터링: 도로 파손, 장애물 또는 기타 잠재적 문제를 신속히 발견하고 보고함으로써 인프라의 안전성과 신뢰성을 유지하는 데 기여한다.
-
범죄 및 폭력 행위 감지: 지도 데이터와 AI 알고리즘을 결합해 이상 행동을 식별하고 위치를 파악함으로써 공공 안전을 지원한다.
이러한 응용은 단순히 지도의 기능성을 향상시킬 뿐 아니라 도시 관리와 사회 안전에 실질적인 가치를 제공한다.
3. FrodoBots
FrodoBots는 로봇을 통한 게임화된 데이터 수집 프로토콜로, 사용자는 원격으로 지상 로봇을 조종해 지리 데이터를 수집할 수 있다. 컨트롤러, 키보드, 게임용 핸들 등 다양한 조작 방식을 지원한다. 또한 연구자들은 플랫폼에 AI 항법 모델을 배포해 테스트할 수도 있다. 사용자는 운전 작업 완료 시 FrodoBot Points(FBPs)를 획득하며, 포인트는 작업 거리와 난이도에 비례해 부여된다. FrodoBots는 다수의 도시에서 테스트를 진행했으며, AI와 인간 간 항법 능력을 겨루는 경쟁대회도 개최했다. 더불어 '길드(Guild)'와 유사한 Earth Rovers School 시스템을 구축해, 신규 사용자가 Earth Rovers를 임대해 데이터 수집에 참여할 수 있도록 하고 있다.
4. JoJoWorld
JoJoWorld는 3D 공간 데이터 수집에 특화된 프로토콜로, 사용자의 데이터 기여를 통해 3차원 모델을 훈련시킨다. 고품질 3D 데이터를 제공하며, 가상현실(VR), 도시 계획 등 다양한 디지털 시나리오 제작에 활용된다. 사용자는 이러한 3D 데이터를 직접 구매해 개인화된 디지털 모델 개발에도 사용할 수 있다.
다음 네 개의 프로토콜 역시 현실 세계의 공간 데이터 수집을 목표로 하지만, 로봇 모델 훈련 등 보다 세분화된 응용 분야에 집중하고 있다. 이들은 긴 꼬리(Long-tail) 데이터와 특정 요구사항에 초점을 맞춰 탈중앙화 공간지능 네트워크(DeSPIN) 생태계에 새로운 가능성을 불어넣고 있다.
5. PrismaXAI
PrismaXAI는 제1인칭 시점(First-person view)을 통해 특정 상황의 데이터를 수집하는 프로토콜로, 손-물 상호작용, 동적 움직임, 소셜 모임 등 복잡한 시나리오에 적합하다. 핵심 기술인 Proof-of-View(PoV)는 데이터의 진위성을 보장하며, 탈중앙화 검증 메커니즘을 통해 데이터 주석의 정확성을 높인다. 이 프로토콜은 긴 꼬리 데이터 확보에 큰 잠재력을 지니며, 모델 훈련에서 독특한 경쟁 우위를 제공한다.
6. OpenMind AGI
OpenMind AGI는 시각-언어-행동 모델(VLAMs)을 통해 현실 세계를 이해하는 것을 목표로 한다. 핵심 시스템 OM1은 동적인 현실 환경과 상호작용할 수 있는 멀티플랫폼 운영체제로, 특히 로보틱스의 맞춤형 개발에 적합하다. 플랫폼은 스마트폰과 로봇을 통해 데이터를 수집하고, 이를 로봇 개발자들과 공유해 로봇 응용 시나리오의 개선과 혁신을 추진한다.
7. MeckaAI
MeckaAI는 탈중앙화된 로봇 AI 모델 훈련 프로토콜로, 사용자가 영상 데이터를 업로드해로봇 행동 모델을 훈련시키는 데 기여한다. 모바일 앱을 제공하며, 사용자는 작업 완료 시 OG Mecka Points를 획득해 데이터 기여를 유도한다. MeckaAI는 대중 참여 모델을 통해 로보틱스 기술 발전을 추진하고, 훈련 데이터 확보의 진입 장벽을 낮추는 데 주력하고 있다.
8. Xmaquina DAO
Xmaquina DAO는 오픈소스 로봇 프로젝트를 지원하는 탈중앙화 자율조직(DAO)이다. 다른 프로토콜들이 직접 모델 훈련에 참여하는 것과 달리, Xmaquina DAO의 핵심 목표는 자원 배분을 통해 로봇 분야의 연구와 혁신을 지원하는 것이다. 내부 혁신센터 Deus Lab은 로봇 기술의 연구개발에 집중하며, MachineDAO는 $DEUS 토큰 스테이킹을 통해 투표 방식으로 자원을 어떤 프로젝트에 할당할지 결정한다. 이 모델은 로봇 기술의 오픈소스 발전에 재정적 지원을 제공하면서 동시에 자원 배분의 투명성과 공정성을 보장한다.
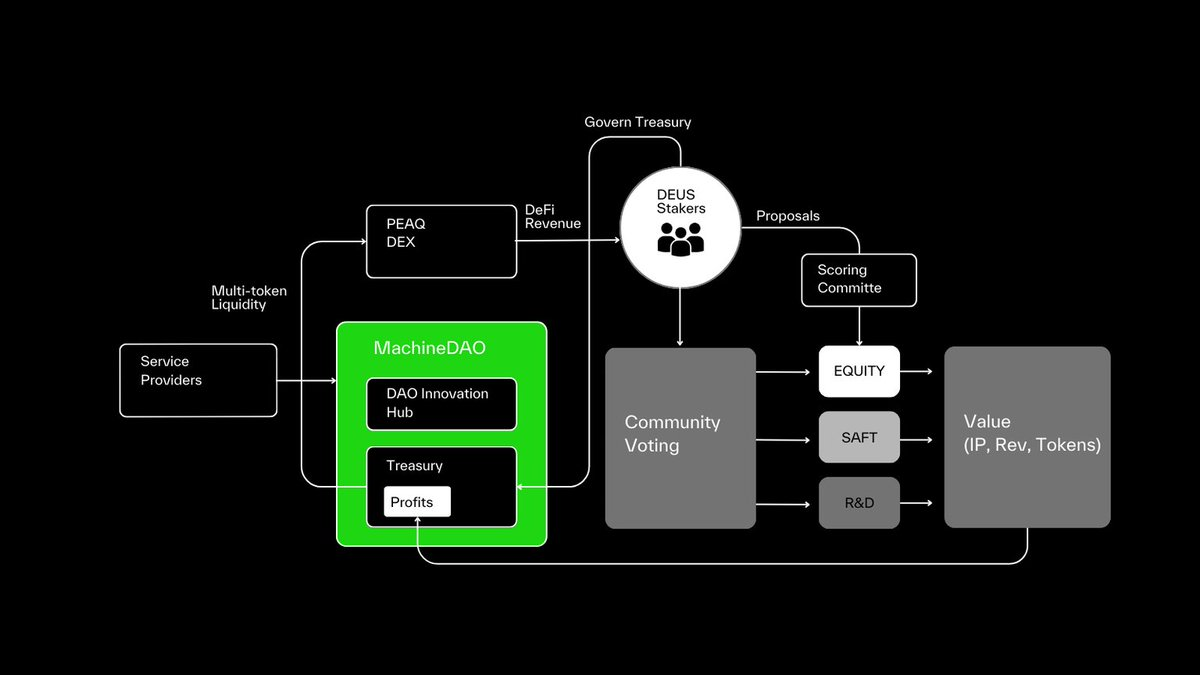
MachineDAO 조직 구조도
편집상의 이유로 여기에서는 다루지 않았지만, Alaya_AI,Gata_xyz,KrangHQ 등과 같은 유사 분야의 프로토콜들도 마찬가지로 주목할 만하다.
DeSPIN의 미래: 기여에서 가치 창출로
DeSPIN은 아직 초기 단계이지만 그 잠재력은 무시할 수 없다. 물리적 AI와 구현 AI(Embodied AI)의 발전, 그리고 인간 데이터 함대(Human Data Fleet)와 같은 새로운 개념의 등장과 함께 DeSPIN은 새로운 기술 혁명을 이끌 가능성이 크다.
향후 한 가지 가능성 있는 트렌드는 '훈련하면 수익을 얻는(Train-to-Earn, T2E)' 모델의 보편화다. 사용자는 일상생활에서 수집한 공간 데이터로 가치를 기여하고, 데이터 품질에 따라 보상을 받게 될 것이다. 예를 들어 탈중앙화된 스마트 안경의 등장은 데이터 수집의 정밀도와 다양성을 크게 향상시킬 수 있다. 스마트 안경이 수집하는 데이터는 인간이 세상을 인식하는 방식을 가장 현실적으로 반영할 뿐 아니라, 환경 노이즈, 얼굴 특징 등 긴 꼬리 데이터를 많이 포함해 공간지능 분야에 더욱 광범위한 가능성을 열어준다.
그러나 DeSPIN의 발전은 몇 가지 도전 과제에 직면해 있다.
-
데이터 검증: 대중 참여 방식의 데이터가 진실되고 정확한지 어떻게 보장할 것인가?
-
윤리적 문제: 데이터 사용을 어떻게 규제해 개인정보 유출과 남용을 방지할 것인가?
-
수요 측의 수용성: 전통 기관들이 탈중앙화된 데이터 세트를 받아들일 의향이 있을까?
이러한 문제들의 해결 여부가 DeSPIN의 미래 방향을 결정지을 것이며, 앞으로 추가적인 연구와 논의가 필요하다.
TechFlow 공식 커뮤니티에 오신 것을 환영합니다
Telegram 구독 그룹:https://t.me/TechFlowDaily
트위터 공식 계정:https://x.com/TechFlowPost
트위터 영어 계정:https://x.com/BlockFlow_News













